2025-4-13-再探DeepSeek之MLA+MoE
4/16:
感觉MoE此处还得修修补补。
4/15:
写了两天了,尊嘟很长。顺便diss一下下面的三篇blog。虽然算是比较偏算法讲解部分,但是还是有错误的。比如:
感觉都存在一定的问题。我上方圈画出来的部分中,比如说:
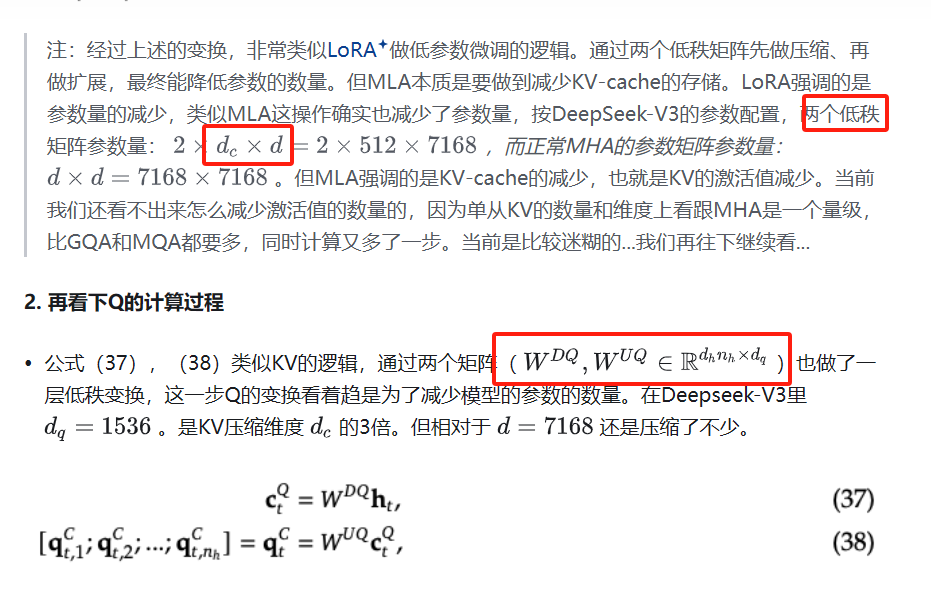
- “低秩矩阵”指代不明,若是指的是$W^{UK},W^{UV}$,但是这个又不是用来降维用的;或许只是指明这两个矩阵的秩比较低??好奇怪,不如说是维数比较低的矩阵。
- 如果指的是$W^{UK},W^{UV}$的话,二者的维度是$d\times d_c$.
- 这个错的比较明显:就是$W^{DQ}\in\mathbb{R}^{d_c’\times d},W^{UQ}\in\mathbb{R}^{d_hn_h\times d_c’},W^{QR}\in \mathbb{R}^{d_h^Rn_h\times d_c’}$.
4/13:
推荐三篇博客,看完之后感觉自己什么都不懂()
只能说要学的东西还是太多了orz orz orz orz orz orz
deepseek技术解读(1)-彻底理解MLA(Multi-Head Latent Attention)
deepseek技术解读(2)-MTP(Multi-Token Prediction)
基本上包含上述的内容+自己理解+补充内容
DeepSeek-MoE
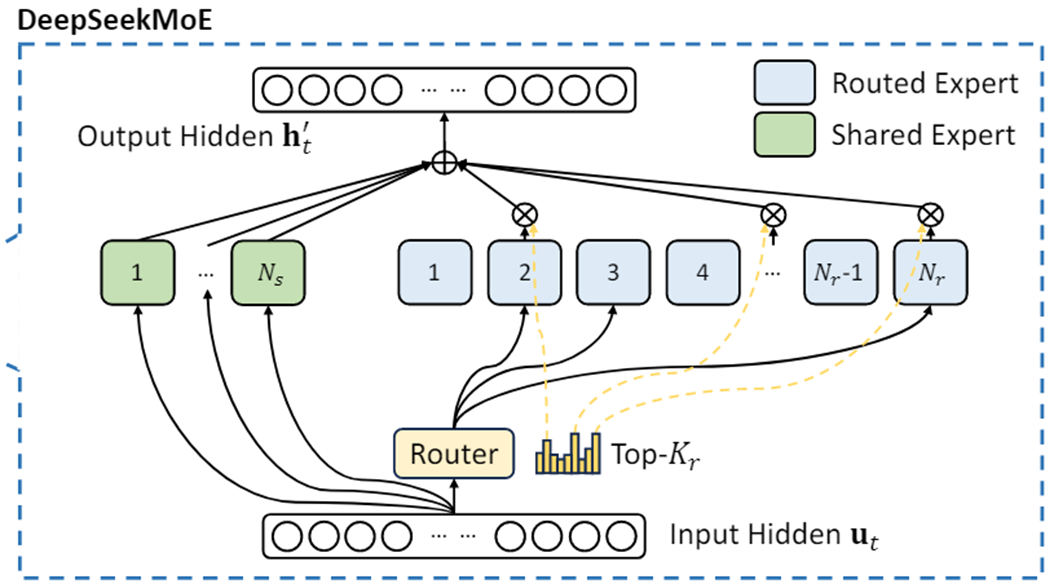
DeepSeek MoE 是 Transformer 架构中的部分,其核心改进在于用 MoE 层 替代了标准的 FFN(Feed-Forward Network)。架构如下。
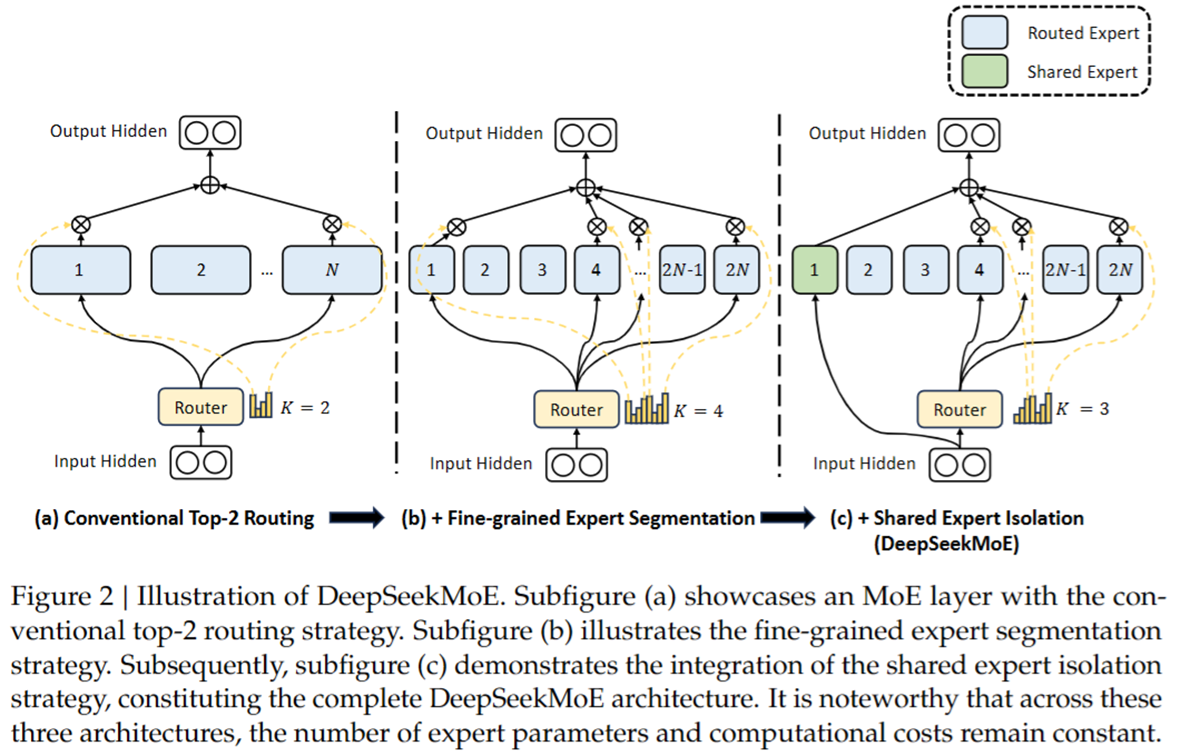
相较于普通的MoE有何区别?值得注意的是,在这三种体系结构中,专家参数的数量和计算成本保持不变。
- 子图(a)展示了具有传统top-2路由策略的MoE层。
- 子图(b)说明了细粒度专家分割策略。
- 子图(c)展示了共享专家隔离策略的集成,构成了完整的DeepSeekMoE架构。
输入:Token Embeddings(词嵌入向量):经过 Self-Attention 计算后的隐藏状态(hidden states),维度通常为 [batch_size, seq_len, hidden_dim]。对于共享专家直接输入,而走普通专家,则需要先经过 路由(Router) 机制,决定哪些专家(Expert)参与当前 token 的计算。
输出:加权专家输出的组合。每个 token 会被分配给 少数几个专家(如 Top-2),它们的输出按权重组合后,形成最终的输出,维度仍为 [batch_size, seq_len, hidden_dim]。
| 方面 | 说明 |
|---|---|
| 输入 | Token 经过 Self-Attention 后的隐藏状态 |
| 输出 | 由部分专家组合计算的加权输出 |
| MoE 结构 | 多个专家 + 路由机制,稀疏激活 |
| 优势 | 计算高效、模型容量大、任务适应性强 |
| 替代 FFN | FFN 计算密集,MoE 实现动态计算 |
| 专家含义 | 自动学习不同技能,可能对应不同任务模式 |
每个专家代表什么?
MoE 中的 专家(Expert) 并不是人为设定的,而是在训练过程中 自动学习不同的特征或技能。可以类比为:
- 隐式的专业化分工:
- 某些专家可能擅长 数学推理。
- 某些专家可能擅长 代码生成。
- 某些专家可能擅长 自然语言理解。
- 自动路由机制:
- Router 会根据输入 token 的语义,自动选择最相关的专家组合。
- 例如,数学问题可能激活 擅长逻辑推理的专家,而代码生成可能激活 擅长结构化输出的专家。
专家是否真的具有可解释性?
- 部分可解释:一些研究发现,MoE 模型的专家会倾向于处理特定类型的数据(如代码、数学等)。
- 但并非绝对:由于是自动学习,专家的分工可能是 隐式 的,不一定严格对应人类可理解的类别。
例子
假设我们有一句话: “猫喜欢吃鱼,但狗更喜欢啃骨头。” 模型需要处理这句话的每个词(token),并生成对应的语义表示。
FFN处理
在标准 Transformer 中,每个词 都会经过 同一个 FFN 进行计算,就像所有学生(token)都必须听 同一个老师(FFN) 讲课,无论他们是否需要这个知识。
- 输入序列(假设每个词已编码为向量):
[猫, 喜欢, 吃, 鱼, 但, 狗, 更, 喜欢, 啃, 骨头] - FFN 的工作方式:
- 每个词(如
猫、鱼、狗、骨头)都经过 完全相同的全连接层。 - 即使
猫和鱼是动物相关词,啃和吃是动作词,它们用的却是 同一套参数,缺乏 specialization(专业化)。
- 每个词(如
问题:
- 计算量大:所有词都经过 FFN,即使有些计算是冗余的。
- 模型容量受限:FFN 参数固定,难以同时学好不同领域的知识(如动物、动作、对比关系)。
MoE(混合专家)处理
MoE 用 多个专家(Experts) 替代单一 FFN,并引入 路由机制(Router),动态决定每个词由哪些专家处理。 假设我们有以下专家(实际是自动学习的,这里仅举例):
| 专家编号 | 可能擅长的领域(模型自动学习) |
|---|---|
| Expert 1 | 动物相关词汇(猫、狗、鱼、骨头) |
| Expert 2 | 动作相关词汇(吃、啃、喜欢) |
| Expert 3 | 逻辑关系(但、更) |
| Expert 4 | 通用词汇(其他) |
MoE 的工作流程:
- 路由(Router)决定分配:对每个词,Router 计算它属于各个专家的概率(如
猫→ 80% Expert 1, 10% Expert 2, 5% Expert 3, 5% Expert 4)。选择 概率最高的 2 个专家(Top-2 Routing,常见设定)。 - 专家计算:每个词仅由 被选中的专家 处理,其他专家不参与计算(稀疏激活)。
- 加权组合输出:选中的专家输出按路由权重相加,得到最终表示。
DeepSeekMoE: Route Expert+Shared Expert.共享专家(Shared Expert)的作用类似于一个“全能替补队员”,它既能为特定领域提供辅助支持,又能保证通用知识的覆盖,避免某些token因路由分配不均而“无人处理”。
共享专家是MoE层中一个或多个被所有token共享的专家,无论路由如何分配,它都可能以一定概率参与计算。它不像其他专家那样高度专业化,而是具备通用知识,起到“兜底”作用。
猫 和 鱼 主要由 动物专家(Expert 1) 处理,而 吃 和 啃 主要由 动作专家(Expert 2) 处理。
| 词(Token) | 可能被分配的专家(Top-2) | 计算方式 |
|---|---|---|
| 猫 | Expert 1(动物) + Expert 4(通用) | 由动物专家主导 |
| 吃 | Expert 2(动作) + Expert 1(动物) | 由动作专家主导 |
| 鱼 | Expert 1(动物) + Expert 4(通用) | 由动物专家主导 |
| 但 | Expert 3(逻辑) + Expert 4(通用) | 由逻辑专家主导 |
| 狗 | Expert 1(动物) + Expert 4(通用) | 由动物专家主导 |
| 啃 | Expert 2(动作) + Expert 1(动物) | 由动作专家主导 |
MoE 相比 FFN 的优势
| 特性 | 标准 FFN | MoE |
|---|---|---|
| 计算方式 | 所有 token 使用相同的 FFN | 每个 token 只激活部分专家 |
| 参数效率 | 参数固定,计算全部激活 | 参数更多,但计算量可控(稀疏激活) |
| 模型容量 | 受限于单一 FFN 的尺寸 | 可扩展(增加专家数量不影响计算量) |
| 训练/推理效率 | 计算量随模型尺寸线性增长 | 计算量可控(仅激活部分专家) |
MLA
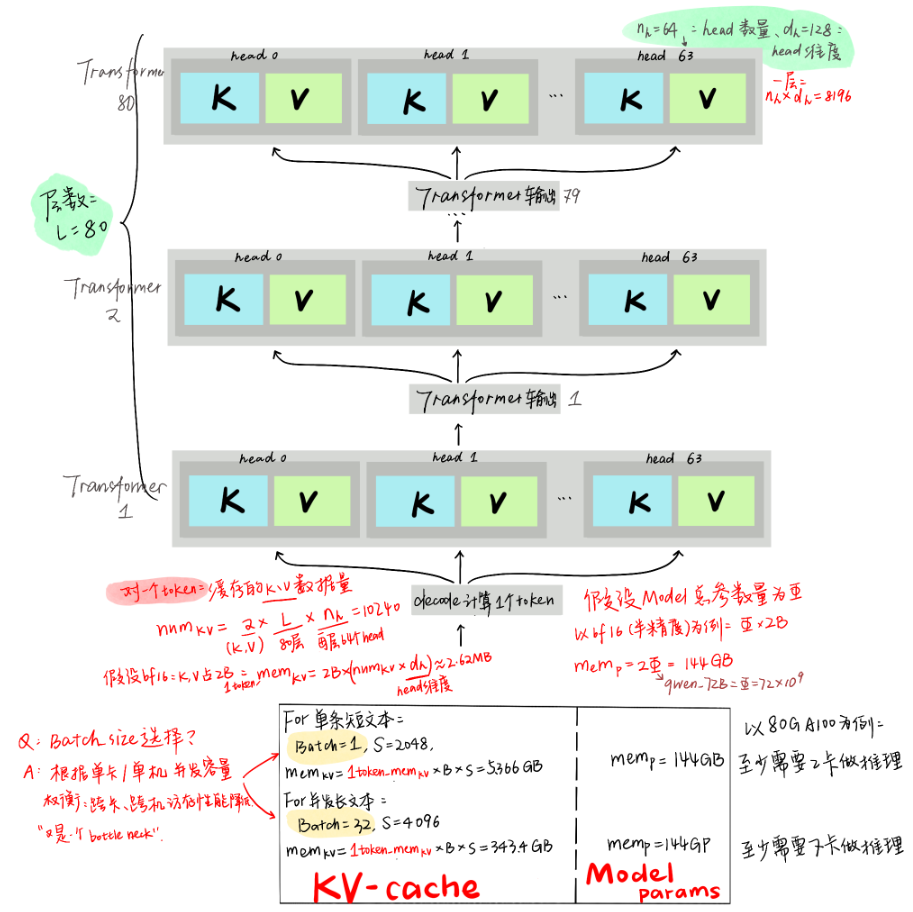
MLA主要是为了减少KV的内存消耗,那么首先想要对LLM中KV占比有一个概念。
LLM模型推理过程
- Prefill 阶段
- 给定一段输入 prompt(共
N个 token),模型一次性并行地处理这N个 token,生成第一个输出 token(第N+1个 token)的 logits。 - 这个阶段的注意力计算是全并行的,注意力矩阵是
[N x N],即每个 token 都能关注 prompt 中的所有 token。
- 给定一段输入 prompt(共
- Decode 阶段
- 从第
N+1个 token 开始,每次只生成一个 token。每一步的输入是之前已经生成的所有 token。 - 由于自回归的限制,每生成一个 token 都需要依赖前面所有 token 的上下文,导致计算无法并行,每一步必须等待上一步完成。
- 注意力计算是
[1 x (N + i - 1)],即当前 token 需要关注前面所有的 token。
- 从第
LLM基于Transformer,从decoder的结构我们可知:第$t$个token的输出,需要使用Q与前面$1\sim t-1$位置的K,V计算:
- 计算前面的
K,V不受后续的token的影响。(因此可以缓存) - 后面计算$t+1\sim N$的tokens,都需要与前面$1\sim t-1$位置的
K,V计算。(K,V出现冗余)
Q: 所有的LLM都是基于Transformer的吗?
A: 几乎所有主流 LLM 都是基于 Transformer 架构的,尤其是 decoder-only Transformer。
KV-cache机制
目前主流的KV-cache机制:将前序计算好的KV缓存起来。
缺点:空间换时间。GPU显存也很宝贵。
换句话说:
- 如果不用KV-cache模型直接计算(重复计算前序
K,V),是个计算密集型任务;- 增加了KV-cache,现在
K,V不是通过计算得到,而是从「存储介质」里读出来,GPT内核与存储介质之间要频繁读写,这样就变成了一个访存密集型任务。所以使用了KV-cache的机制,解决的重复计算的问题,但访存的速率也就直接影响到训练和推理的速度。
LLM推理阶段显存使用情况
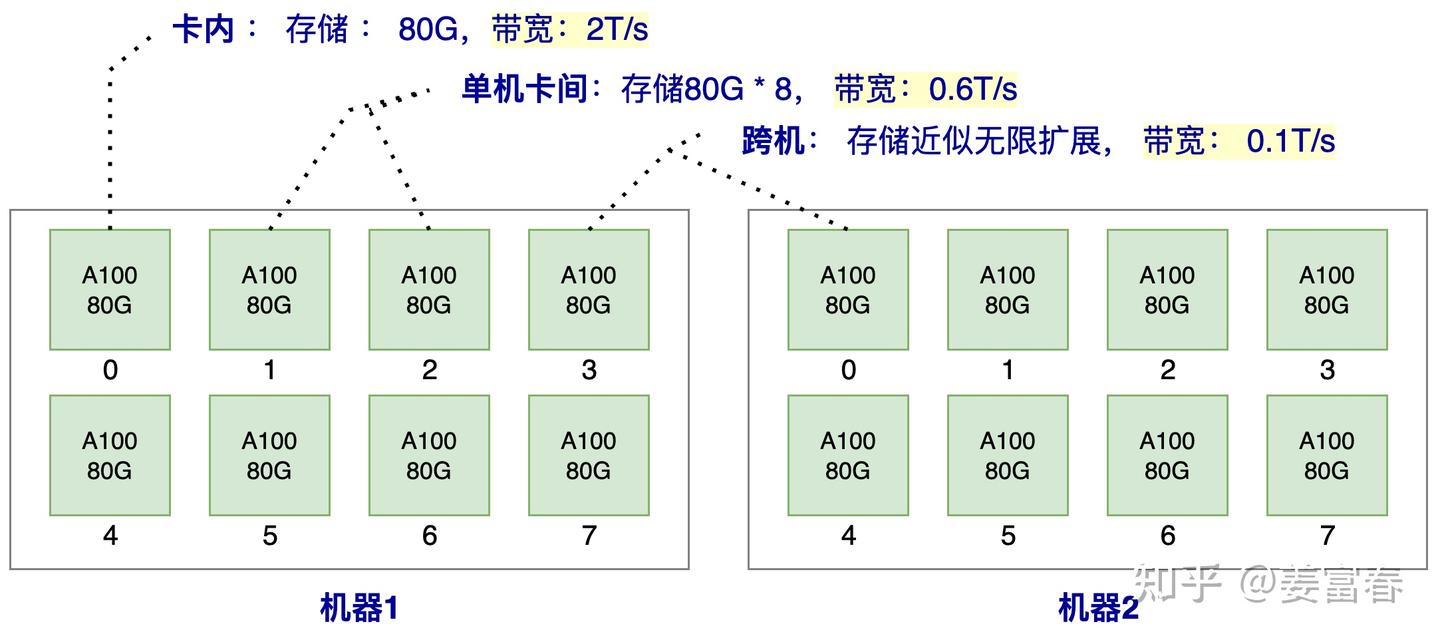
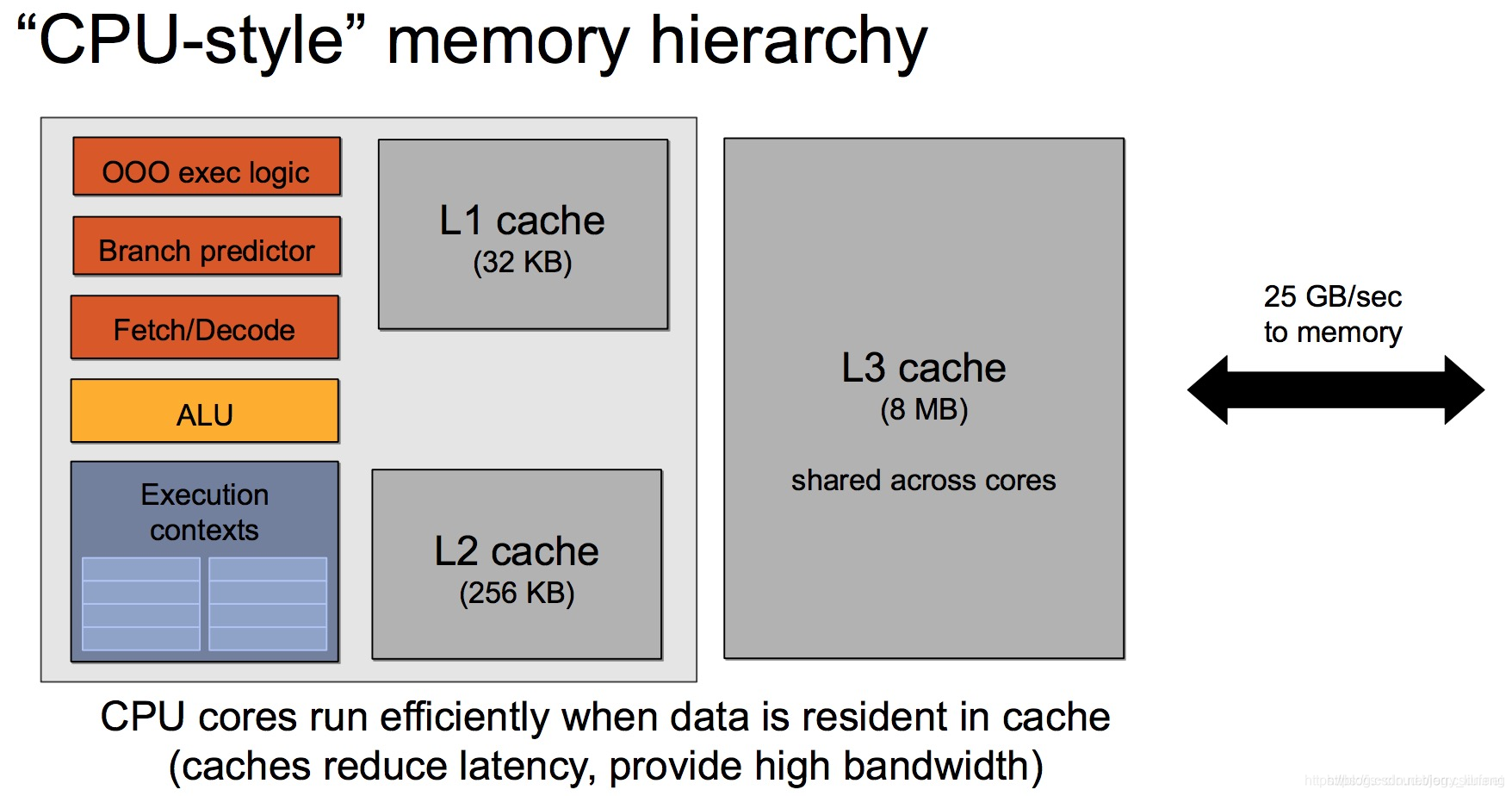
访存速率分级
由下图的访存带宽可知,卡内的带宽是单机卡间的带宽的3倍,是跨机带宽的20倍,所以我们对于存储的数据应该优先放到卡内,其次单机内,最后可能才考虑跨机存储。
在GPU上部署模型的原则是:能一张卡部署的,就不要跨多张卡;能一台机部署的,就不要跨多台机。这是因为“卡内通信带宽 > 卡间通信带宽 > 机间通信带宽”,由于“木桶效应”,模型部署时跨的设备越多,受设备间通信带宽的的“拖累”就越大
【到了熟悉的计组时间(>v<) !】
通用的GPU的存储介质除了显存,还有SRAM(Static Random Access Memory)/DRAM(Dynamic Random Access Memory),二者是一个“速度-容量-成本”之间的权衡组合。
- SRAM 快但贵,用来加速
- DRAM 慢但大,用来存储
| 特性 | SRAM | DRAM |
|---|---|---|
| 类型 | 静态随机存储 | 动态随机存储 |
| 是否需刷新 | 否 | 是 |
| 速度 | 快(低延迟) | 慢(高延迟) |
| 成本 | 高 | 低 |
| 密度 | 低 | 高 |
| 容量 | 小(KB~MB) | 大(GB 级) |
| 常见用途 | Cache、寄存器、Shared Memory | 显存(GDDR/HBM)、主存(DDR) |
| GPU 中的体现 | L1/L2 Cache, Registers, Shared Mem | Global Memory, 显存 |
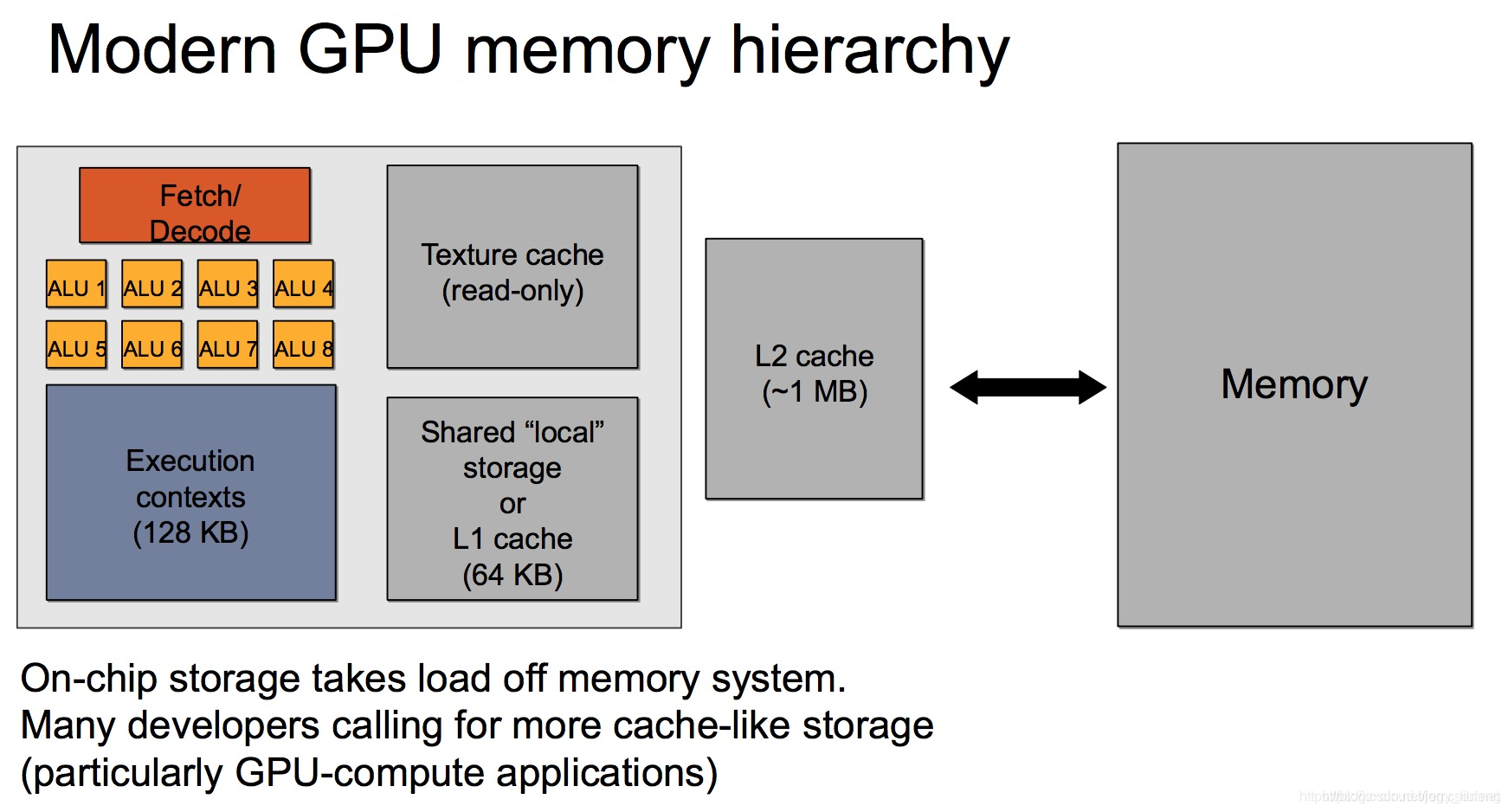
Q: 话说回来,不同厂家的GPU的内部架构都不同,所以呢??
A: 不同厂商(比如 NVIDIA、AMD、Apple、Google TPU、华为昇腾)在 GPU 或 AI 加速器上的 架构设计差异巨大,但在存储层级的设计上,确实存在一个“通用范式”:由快而小的 SRAM(如 Registers、Shared Memory、L1/L2 Cache)构成近端缓存层,由慢而大的 DRAM(如 Global Memory 或 HBM)构成主存层。
通用 GPU 存储层级(从快到慢):
| 存储层级 | 类型 | 作用 | 典型介质 | 延迟/带宽 | 容量级别 |
|---|---|---|---|---|---|
| 寄存器 | SRAM | 单个线程/线程组的局部变量 | SRAM | 极低/极高 | KB/线程组 |
| Shared Memory / Local Data Store | SRAM | 一个线程块/工作组共享 | SRAM | 极低/高 | 64~128KB |
| L1 Cache | SRAM | 核心级缓存 | SRAM | 低 | ~128KB |
| L2 Cache | SRAM | 多核心共享缓存 | SRAM | 中 | 数 MB |
| Global Memory / 显存 | DRAM | 所有线程可访问的数据区 | GDDR / HBM | 高 | GB 级 |
| Host Memory | DRAM | 主机 RAM(通过 PCIe/NUMA) | DDR4/5 | 非常高 | 多 GB |
不同厂商的差异主要体现在:
| 厂商 | 特点或差异化设计 |
|---|---|
| NVIDIA | CUDA 架构明确划分 Registers、Shared Memory、L1/L2、Global Memory。Ampere 开始用 HBM。 |
| AMD | ROCm 架构类似,使用 LDS(Local Data Store)等概念来等价 Shared Memory。 |
| Apple M 系列 | 统一内存架构(UMA),CPU/GPU 共享物理内存,省去拷贝但牺牲带宽。 |
| TPU (Google) | 大量使用 on-chip SRAM,结构非 Transformer-like,但仍保有近似层级。 |
| 华为 昇腾 / 寒武纪 | 加入 AI Core Buffer,模型层输出缓存有定制优化。 |
尽管名称、调度方式不同,但它们都遵循“小而快的近端缓存 + 大而慢的远端主存”这一通用理念。
模型推理阶段显存分配
减少KV Cache的目的: 就是要实现在更少的设备上推理更长的Context,或者在相同的Context长度下让推理的batch size更大,从而实现更快的推理速度或者更大的吞吐总量。
推理阶段主要有三部分数据会放到显存里。
- KV Cache : 如上一节所述,前序token序列计算的
K,V结果,会随着后面tokent推理过程逐步存到显存里。存储的量随着Batch,Sequence_len长度动态变化。 - 模型参数:包括Transformer、Embedding等模型参数会存到显存里。模型大小固定后,这个存储空间是固定的。
- 运行时中间数据: 推理过程中产出的一些中间数据会临时存到显存,即用即释放,一般占用空间比较小。
因此,主要存储消耗是:KV cache和模型参数。
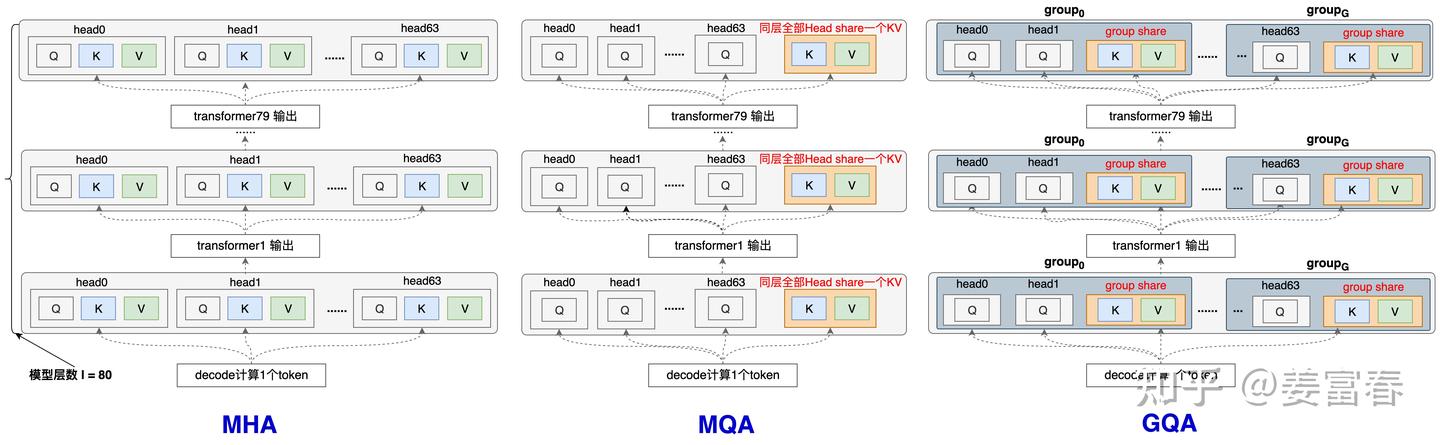
共享KV优化显存方法:MQA/GQA
- MQA(Multi-Query Attention):每一层的所有Head,共享同一个
K,V来计算Attention。相对于MHA的单个Token需要保存的KV数( $2∗l∗n_h$ )减少到了( $2*l$ )个,即每一层共享使用一个K向量和一个V向量。 - GQA(Group-Query Attention):GQA是平衡了MQA和MHA的一种折中的方法。不是每个Head一个KV,也不是所有Head共享一个KV,而是对所有Head分组,比如分组数为 $g$ ,每组: $n_h/g$个Head 共享一个KV。
- 当 $g=1$ 时,GQA就等价于MQA;
- 当 $g=n_h$时, GQA就等价于MHA。
| KV cache缓存量 | |
|---|---|
| MHA | $2ln_h$ |
| MQA | $2*l$ |
| GQA | $2lg,1\le g\le n_h$ |
MLA优化KV-cache
每个Transfomer层中,只缓存了$\mathbf{c}^{KV}_t,\mathbf{k}^R_t$:
- $\mathbf{c}^{KV}_t$: $dim=d_c=4*d_h=512$
- $\mathbf{k}^R_t$: $dim=d_h^R=d_h/2=64$
对比MQA(每层KV:$2d_h=256$),MLA相当于增加了2.25倍的存储。
Q: 但DeepSeek描述自己的方法不仅比MQA强,而且比非共享KV的原始MHA也要强,这是为什么??
A: MLA具有恢复全
K,V的能力。特征表达能力显著比GQA、MQA要强。MLA 中 KV 的计算流程:通过低秩压缩 $\rightarrow$ 缓存一个小维度的中间变量 $\rightarrow$ 后续再恢复出完整维度的 $K$、$V$。
好,回到公式来看看到底为什么。
对于输入$h_t$进行低秩压缩,将$d$维($d=d_h*n_h$, 隐含层维度)输入经过$W^{DKV}\in \mathbb{R}^{d_c\times d}$变换矩阵后得到$\mathbf{c}^{KV}_t$。
然后再通过两个变换矩阵$W^{UK},W^{UV}\in\mathbb{R}^{d\times d_c}$,$\mathbf{c}^{KV}_t$得到$\mathbf{k}_{t}^C,\mathbf{v}_{t}^C$,又将KV的维度扩展回$d$(相当于MHA的每个Head都有单独的K,V)。
DeepSeek-V3: $d=7168,d_c=512$
对比MLA/MHA的KV变换矩阵参数:
两个矩阵$W^{UK},W^{UV}$参数量:$2dd_c=27168512$
正常MHA的参数量是(KV):$2d\times d =27168*7168$
模型 K/V 生成方式 用了什么参数? 产生的激活值维度(KV Cache) 对比焦点 标准 MHA 每个 token 的输入 $h_t \in \mathbb{R}^d$ 乘上 $W^K, W^V \in \mathbb{R}^{d \times d}$ 得到 K, V 参数量:$2d \times d$ 缓存每层、每 token 的 K/V(共 $2 \times L \times d$) 参数量 vs MLA MLA 先压缩为 $c^{KV}_t \in \mathbb{R}^{d_c}$,再用 $W^{UK}, W^{UV} \in \mathbb{R}^{d \times d_c}$ 展开 参数量:$2d \times d_c$(更少) 最终 K/V 维度仍为 $d$,缓存量并未真正减少 参数量少但缓存未省 Q: 对于MHA的维度?
A:解释:此处主要对比的是变换矩阵的参数量(此矩阵必然被加载进显卡,然后与input进行矩阵运算)
MHA得到QKV的计算公式如下(Linear Layer):
在标准 MHA 中,Query、Key、Value 向量是分别由输入 $X$ 通过线性层 $W^Q, W^K, W^V$ 得到的。虽然这三个矩阵的形状通常都是 $d \times d$,但它们的参数是各自独立的,不共享。KV部分的参数总量就是 $2 \times d \times d$,构成模型参数的一部分。
在看一下Q的优化:
对比MLA/MHA Query部分的参数量:
DeepSeek-V3中$d_q=1536$,$W^{DQ}\in\mathbb{R}^{d_c’\times d},W^{UQ}\in\mathbb{R}^{d_hn_h\times d_c’},W^{QR}\in \mathbb{R}^{d_h^Rn_h\times d_c’}$
MLA: 合计参数量 ≈ 27.5M
- $W^{DQ}$: $d_c’ \times d = 1536 \times 7168 \approx 11M$
- $W^{UQ}$: $d_h n_h \times d_c’ = 7168 \times 1536 \approx 11M$
- $W^{QR}$: $d_h^R n_h \times d_c’ = 3584 \times 1536 \approx 5.5M$($d_h^R = d_h/2 = 64$, $n_h=56$)
MHA: $d \times d = 7168 \times 7168 \approx 51M$
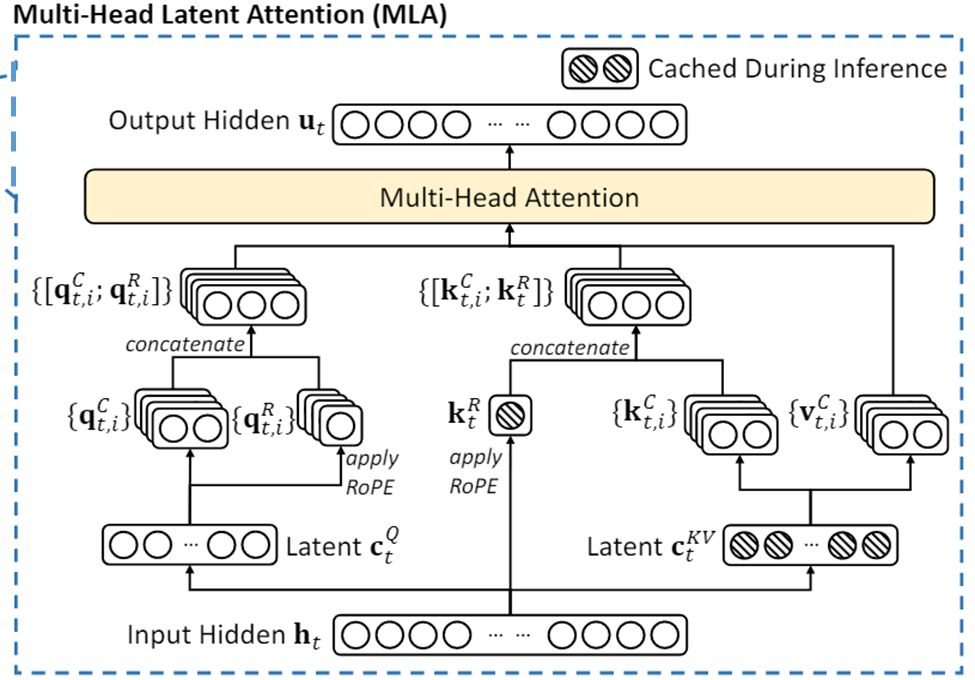
RoPE位置编码:
$q_t^R,k_t^R\in\mathbb{R}^{d^R_h},d^R_h=\frac 12 d_h=64$
这部分计算的 ktR 实际是个MQA的计算方式,同一层中,所有的Head共享同一个 k
🧠 背后推理逻辑:
一、观察 $q_t^R$ 和 $k_t^R$ 的计算方式
我们对比公式 (3) 和公式 (7):
(3):
- 输出是一个大向量 $\mathbf{q}t^R$,**明确分成多个 head($\mathbf{q}{t,i}^R$)**,所以每个 head 都有自己独立的 query。
- 暗示 $W^{QR}$ 的输出维度是 $n_h \cdot d_h^R$。
(7):
ktR=RoPE(WKRht)\mathbf{k}_t^R = \text{RoPE}(W^{KR} \mathbf{h}_t)
- 注意这里 没有类似的分头结构:没有写成 $[\mathbf{k}{t,1}^R; \cdots; \mathbf{k}{t,n_h}^R]$。
- 它只是一个单一的向量 $\mathbf{k}_t^R$,没有拆成 per-head 的形式。
➡️ 这就是关键区别:query 有多头结构,而 key 没有。
二、从维度推出“共享”
你还给出了维度:
$q_t^R, k_t^R \in \mathbb{R}^{d_h^R}$,且 $d_h^R = \frac{1}{2} d_h = 64$
这表示每个 head 的维度是 64,但 $k_t^R$ 只有一个向量。
如果是普通多头注意力:
- 每个 head 应该有自己的 $k_{t,i}^R \in \mathbb{R}^{d_h^R}$。
- 那么就应该有 $n_h$ 个这样的 key 向量,即:$[\mathbf{k}{t,1}^R; \cdots; \mathbf{k}{t,n_h}^R]$
但现在:
- 只有一个 $k_t^R \in \mathbb{R}^{d_h^R}$,那就说明 它没有为每个 head 分配一份,所有 head 共享这一份。
三、总结推理链:
- 公式 (3) 明确拆了多个 head 的 $q$。
- 公式 (7) 没有拆头,只有一个 $k$ 向量。
- 维度信息 表明 $k_t^R$ 是一个单向量,而不是 per-head 的矩阵或拼接结构。
- 所以可以得出推论:这是 MQA 中共享 key 的结构。
因此: