2025-3-28/29-RL简介
3.28:
难绷,一直在补坑。。。
这个补完了:AI Agent介绍
3.29:
这几天一直在看Reinforcement Learning。是的,我的框架还没搭好,原因是看的太浅了,不了解RL的一些执行细节,虽然之前有看过Markov Process,但是又是一段时间过去了,忘的都差不多了。
于是来写RL的一些东西。参考来自于李宏毅的RL介绍。
Reinforcement Learning
一句话介绍:不知道正确的答案,借由与环境互动、根据得到的奖励知道:什么是好的、什么是不好的。
区分ML/RL:
- ML:找一个function(映射输入/输出)—>定义loss函数—>最优化
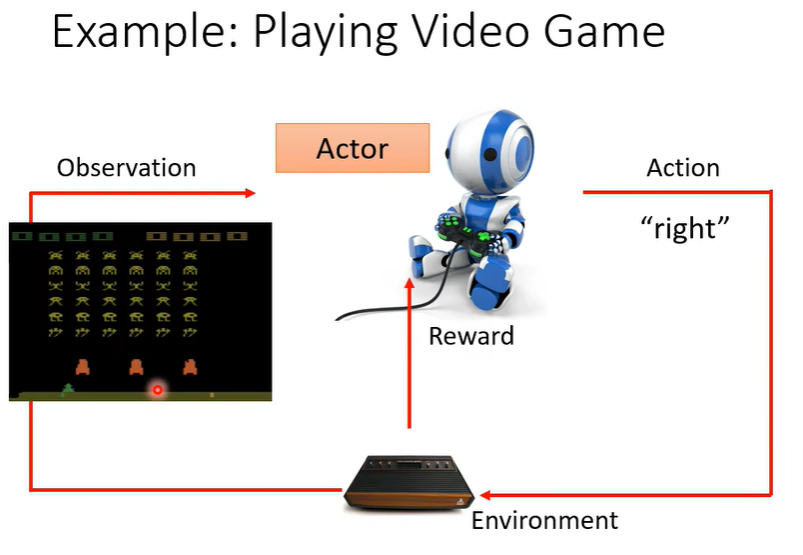
- RL:代理或是叫智能体(Agent)与环境(Env)互动(Observation/Action),相互影响(Reward)
介绍一些术语
Actor/Agent:执行动作的主体,叫做代理或是智能体(下文都称之为智能体)。
Environment:外部的环境。既会影响智能体的行为、又会被智能体执行的行为所影响。
Observation/State:智能体通过环境得到现在的外部的状态、或许还包括了过去对外部状态的观测。
Action:智能体决定执行的动作、会影响到外部的环境。
Policy:智能体A不同于其他智能体B,对于智能体如何决定执行的动作、以及动作又会怎么影响环境(Reward)的整体。可以说是整个模型。通过Reward的optimization可以更新。
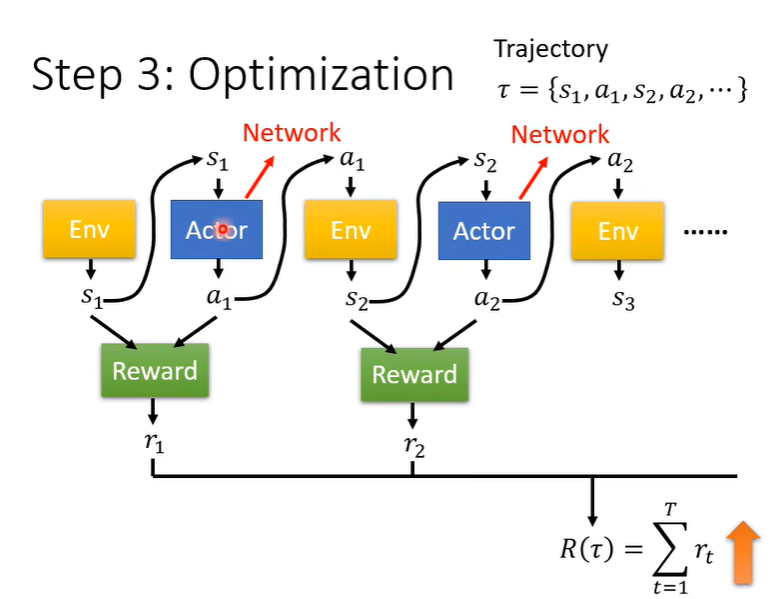
Episode:一个episode指的是一句游戏从开始到结束、其中经过的所有的状态以及动作的时间。可以得到一系列$\{s,a\}$(状态-动作)的集合。
Trajectory:指一个智能体在环境中进行了一系列动作是所经历的状态、动作、奖励的序列。一般是一个episode可以得到的一系列$\{s,a\}$的集合是一个Trajectory。用于训练智能体、学习从状态到动作、最终最大化总体奖励。
Reward:抽象的程度比较高,总的来说就是批判智能体执行当前动作的评价标准。与此相关的概念有:
- discount cumculated function: 在状态$s$下采取动作$a$后,期望获得多少的奖励。
- value function:在状态$s$下,无论采取什么动作,期望的奖励是多少(对于当前状态的评估,一般是平均期望奖励)。
- Advantage function:$A(s,a)$表示某个特定动作$a$相对于其他动作的优劣程度。
RL与ML之间的联系
对于强化学习来说,实际上比较类似于分类任务,对于给定的输入in:Env—>Observation/State,预测out:Action。并给出不同Action的置信度(然后Agent按照不同Action得到的置信度sample、从Action的distribution中sample)。
要是输入是img,那么和ML也没什么不同。
目标: 找到最佳policy(model),$\max\text{Reward}$。
对于$f$,假如输入是图片、那么需要使用CNN/ViT提取特征;
假如我们想更进一步看到历史的图片,那么可能会选取RNN提取特征。
定义loss
对于RL:经过observation: $s_1,s_2,\dots,s_T$($T$时间游戏结束),在时间$t$下施加动作$a_t$,得到奖励$r_t$
计算总奖励: $R=\sum^T_{t=1}r_t$, 目标(loss func): $\max R$
最优化:根据R的值,例如梯度下降更新policy。
此过程中存在的问题?为什么RL那么难训看人品?
- sample具有随机性:动作必须要随机sample,要保证会有没出现过的动作,
- Env,Reward,是黑盒(里面是什么不知道):Env给出对应回应,Reward给出分数,不知道依据什么给出回应。
- Env/Reward也具有随机性(随着Action的随机)
- 重点:如何求解最优化问题?
RL的过程会有点像GAN:
- Env: Discriminator
- Agent: Generator
如何操控Agent输出
在给定的State下,有两种可能行为:
- 一定采取行动$a$
- 一定不要采取行动$a$
注意:是会采取行动$a$,也会采取行动$b$;明晰此处的不要采取行动$a$,说明会采取$a$以外动作的可能性。
这是我们能够得到的训练数据(收敛了在不同$s$下采取了动作$a$/以及不想采取某动作)
Q: 如何收集训练数据?
A: 无论开始状态是什么,我们都跑很多个episodes,记录下对应的、多组$\{s_1,a_1\},\{s_2,a_2\},\dots,\{s_t,a_t\},\dots$。
第一阶段:行为克隆(Behavior Cloning)——像监督学习一样训练
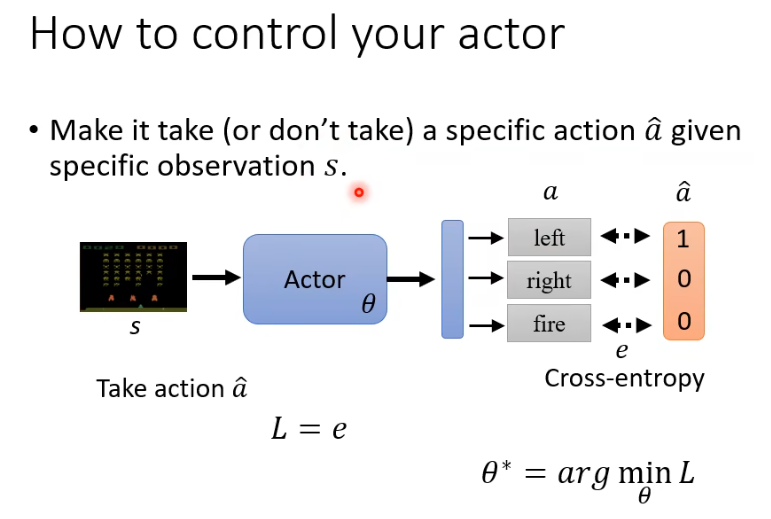
对于Agent,输入State $s$,输出Action $a$。以此可以收集大量的训练数据: $\{s_1,\hat a_1\},\{s_2,\hat a_2\},\ldots,\{s_N,\hat a_N\}$,输出动作与Ground truth之间可以计算交叉熵,这样就有loss,再对loss求梯度下降。
这个过程,我们其实在做的是 模仿学习(Imitation Learning),尤其是其中的 行为克隆(Behavior Cloning)。这时我们有 expert 给的 “正确动作” $\hat{a}$,可以直接用交叉熵 loss:
✅ 这是纯监督学习:用 expert 数据模仿他该怎么做,不涉及任何 reward、Q value、优势函数之类的强化学习概念。
第二阶段:从模仿走向强化学习
但问题是 —— 行为克隆有局限性:
- 如果 expert 数据少、分布不够全,Agent 在训练中可能从没见过某些 state,就不知道该如何决策。
- 没法根据环境反馈进一步“变得更强”,只能学 expert 的行为,无法超越。
于是,我们从“模仿”走向“试错 + 奖励驱动”的强化学习。这时:
- 没有 ground truth 动作了(只有 Agent 自己选择的 a)
- 我们只知道这个动作带来了多少 reward
- 所以,我们要优化的,不是“像 expert 一样”,而是“动作好就多选它,动作差就少选它”
这时候就引入了策略梯度:
进一步为了减小方差,引入了优势函数:
| 阶段 | 方式 | 数据来源 | 优化目标 | 是否需要 Advantage |
|---|---|---|---|---|
| 模仿学习 | 行为克隆(交叉熵) | expert 提供的 $\hat{a}$ | 拟合 expert 的行为 | ❌ 不需要 |
| 强化学习 | 策略梯度(REINFORCE) | Agent 自己采样的 $a$ | 最大化 reward | ✅ 需要 |
这种从行为克隆(交叉熵)到策略梯度(交叉熵 + Advantage 权重)的逻辑演化,是许多强化学习算法的实际路径。例如:
- 初期 warm-up 用行为克隆
- 后期切到策略梯度微调,用 Advantage 来权衡每个动作的好坏
优势函数的提出
Agent对于不同的动作会有不同程度的偏向,我们要显化这种偏向,使用优势函数。
优势函数:期望在$s_1$下做动作$\hat a_1$,在$s_2$下不做动作$\hat a_2$,期望的程度是不同的。
- $A(s,a)$: Advantage Function。表示某个特定动作$a$相对于其他动作的优劣程度。
- $Q(s,a)$: Discounted Cumulative Reward。在状态$s$下采取动作$a$后,期望获得多少奖励。
- $V(s)$: Value Function。在状态$s$下,无论采取什么动作,期望的奖励是多少。(当前状态的期望reward)