2025-3-13-模型构建
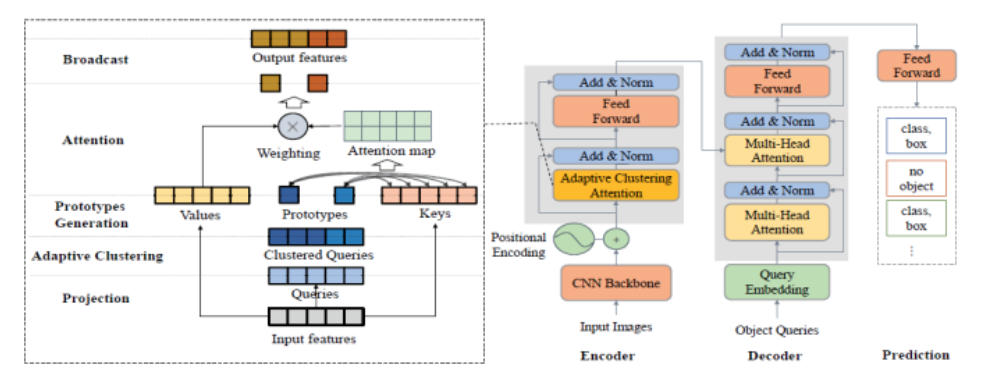
Zheng, Minghang, et al. “End-to-end object detection with adaptive clustering transformer.” arXiv preprint arXiv:2011.09315 (2020).
感觉这个图的形式差不多是我想画的样子。
然后来写我的模型——可恶就是不想写
首先,我不打算使用知识蒸馏。或许后续可以使用训练好的模型再进行知识蒸馏。
输入是一系列的图片,然后将其划分为16*16的patch,然后+pos encoding
得到一系列的向量
投入transformer(DS修改版)*N
输出pred head
对于每层decoder输出的pred head,作为序列信息,用于强化学习。
将 DETR 的解码器每层视为 RL 的一步,定义状态为当前层的对象查询,动作为更新查询,奖励为当前预测与真实框的 IoU(交并比)或分类准确度。
| State | Action | Reward |
|---|---|---|
| 状态定义为当前层的对象查询。 | 动作是更新这些查询。 | 奖励基于预测与真实框的 IoU 或分类准确度。 |
| 每一层的状态是当前的对象查询,这些查询用于预测边界框和类别。 | 动作是解码器层对对象查询的更新。为了让 RL 工作,需要让更新有随机性,比如在更新时加入噪声。 | 奖励函数可定义为均值 IoU 加权分类准确度。 |
这种方法类似于添加辅助损失,可能与标准训练效果类似,但 RL 可提供更多探索性。
梯度更新:

状态定义
- 状态$s_k $ 定义为第 $ k$ 层输入的对象查询$q_k $。这些查询是解码器从上一层继承的,用于与编码器输出交互,生成预测。
- 在 RL 框架中,状态反映当前环境,对象查询的当前状态直接影响后续层的预测。
动作定义
- 动作 $a_k $是第$ k $层对对象查询的更新,即从$q_k $到$ q_{k+1}$ 的变换。在标准 DETR 中,这一更新是确定性的,由自注意力、交叉注意力和前馈网络决定。
- 为使 RL 工作,需引入随机性,使更新成为概率分布。例如,可以让层输出对象查询的均值和方差,从正态分布中采样$q_{k+1} $,概率为$p(q_{k+1} | q_k, \theta_k) $,其中$\theta_k $ 是层的参数。
奖励定义
- 奖励 $r_k $基于第$ k$ 层输出 $q_{k+1} $后的预测质量。预测包括边界框和类别标签,与真实框比较。
- 计算方法:
- 用 $q_{k+1}$ 生成预测边界框和类别。
- 用匈牙利算法匹配预测与真实框,计算均值IoU$\text{mean}(\text{IoU}_k)$和分类准确度($\text{accuracy}_k$)。
- 奖励公式为:$ r_k = \text{mean}(\text{IoU}_k) + \alpha \times \text{accuracy}_k $,其中$\alpha$是权重因子,需实验确定(如 0.5)。
- 替代方案:奖励可以是负损失,即$r_k = - (\text{box_loss}_k + \text{class_loss}_k)$ ,其中 $\text{box_loss}_k$ 和$\text{class_loss}_k$ 是基于当前预测的边界框回归损失和分类损失。
优化过程
- 目标是最大化所有层的累积奖励:$ J = \mathbb{E}\left[ \sum_{k=1}^N r_k \right]$ 。
- 使用 RL 算法如 REINFORCE,梯度更新公式为: $\nabla_{\theta_k} J \approx \sum \left( \sum_{m=k}^N r_m \right) \times \nabla_{\theta_k} \log p(q_{k+1} | q_k, \theta_k)$ 其中,内层和是所有样本,外层和是从第 k k k 层到最后层的奖励总和,反映每一层的贡献。
- 实际中,可用策略梯度方法(如 PPO)优化,考虑探索性和稳定性。
实际应用示例
假设 DETR 解码器有 6 层(N=6 N = 6 N=6),训练过程如下:
- 初始化对象查询,输入第一层。
- 每层输出更新后的对象查询,立即用当前查询预测边界框和类别。
- 计算当前预测的均值 IoU 和分类准确度,代入公式$ r_k = \text{mean}(\text{IoU}_k) + 0.5 \times \text{accuracy}_k$ 。
- 所有层的奖励累加,优化模型参数。
- 训练时,加入噪声使层输出随机,模拟 RL 的探索。
处理相似物体:增加惩罚项,奖励函数可为:
其中 overlap_penalty 是预测框之间 IoU 过高的惩罚,鼓励模型区分相近物体。
如何将$A_i$应用于目标检测?
$A_i$是优势函数,相当于序列打分函数。在目标检测中:
- 候选框和分类打分:对每层解码器生成的候选框和分类进行打分,打分基于奖励 $r_k$,如 IoU 和分类准确度。
- 如何成为序列信息:将 DETR 解码器看作序列过程,$o_1, o_2, \ldots, o_{t-1}, o_t, \ldots$代表每层的对象查询更新。每个 $o_t$是当前层的输出(候选框和分类),序列信息通过层间传递实现:
- 状态$q_t$ 是第 $t$ 层对象查询,动作 $o_t$ 是更新到 $q_{t+1}$,概率为 $\pi_{\theta}(o_t|q_t)$。
- 优势 $A_i = r_i - b_i$,其中 $b_i$ 是基线(如批次平均奖励)。
模型和符号定义:
| 符号 | 说明 | |
|---|---|---|
| $q$ | 输入状态,目标检测中为图像特征或对象查询。 | |
| $\pi_{\theta}(o | q)$ | 策略分布,模型输出动作 $o$ 的概率,$o$ 为对象查询更新。 |
| $\pi_{\theta_{old}}(o | q)$ | 上一轮策略分布,用于比率计算。 |
| $o_i$ | 第 i 个样本的动作,目标检测中为第 t 层的对象查询更新。 | |
| $G$ | 样本组大小,通常为批次大小。 | |
| $A_i$ | 优势函数,基于奖励$r_i$ 和基线 $b_i$,$A_i = (r_i - b_i)/std(r_i)$。 | |
| $\epsilon$ | 裁剪参数,控制策略更新范围,通常为 0.2。 | |
| $\pi_{ref}$ | 参考策略,用户指定为 ground truth(标注的 label 信息),目标检测中为真实框和类别分布。 | |
| $\beta$ | KL 散度的权重,控制分类损失强度。 |