2025-1-23-食品检测
- 写出具体任务:输入输出,对问题要比较明确。
- 面临挑战
- 当前领域的经典方法,和最新方法benchmark
- 给出自己的技术路线
检测vs识别vs分割
| 检测(Detection) | 识别(Recognition) | 分割(Segmentation) | |
|---|---|---|---|
| 定义 | 检测主要是确定目标物体是否存在于给定的场景(如图像、视频、传感器数据等)中,并大致定位其位置。例如,在一张交通场景的图像中,目标检测任务是找出图像中是否有汽车、行人、交通标志等物体,并确定它们在图像中的位置,通常用边界框(bounding box)来表示位置信息。 | 识别是在检测的基础上,对目标物体进行分类或确认其身份。它侧重于确定目标物体属于哪一个特定的类别。例如,在已经检测到图像中有车辆后,识别任务是判断这辆车是轿车、SUV、卡车还是公共汽车等具体车型;如果是人脸检测后,识别就是确定这个人是谁。 | 分割是将图像、视频或其他数据划分为不同的区域,这些区域通常对应着不同的物体或者物体的不同部分。与检测不同,分割不是简单地用边界框定位物体,而是要精确地划分出物体的轮廓。例如,在医学图像分割中,将人体器官(如肝脏、肾脏等)从CT图像中精确地分割出来,每个像素都被标记为属于某个器官或者背景。 |
| 应用场景 | 安防监控领域,通过摄像头拍摄的视频进行目标检测,可以及时发现可疑人员或物体的出现。例如,在机场候机大厅的监控系统中,检测是否有无人看管的行李等异常情况。 工业检测中,检测产品表面是否有缺陷。比如在电子芯片生产过程中,检测芯片表面是否有划痕、杂质等缺陷,只需要确定缺陷是否存在以及大概位置,后续可能会进一步分析缺陷的类型等。 | 门禁系统中,对人脸进行识别,判断进门的人员是否是授权用户。当摄像头检测到人脸后,通过人脸识别算法与预先存储的人脸数据库进行比对,识别出这个人的身份,决定是否允许其进入。 文档处理中,识别文字的内容和字体。例如,将扫描的纸质文档中的文字进行识别,确定每个字符是什么字,属于哪种字体,然后将其转换为可编辑的电子文本格式。 | 医学影像领域,对肿瘤的分割非常重要。通过对MRI或CT等医学影像进行分割,可以精确地确定肿瘤的大小、形状和位置,帮助医生更好地诊断病情和制定治疗方案。 自动驾驶领域,对道路场景进行分割,区分出道路、车辆、行人、交通标志等不同的部分。这样汽车的智能系统可以更准确地了解周围环境,例如判断车辆是否偏离车道,或者识别出前方的行人等。 |
| 输出结果 | 检测的输出通常是一系列的边界框坐标(对于图像和视频数据),每个边界框对应一个检测到的目标物体,同时可能会有一个置信度分数,表示检测结果的可靠性。例如,一个目标检测算法检测到一张图像中有汽车,输出的可能是一个包含汽车的矩形边界框的左上角和右下角坐标,以及一个表示这个检测是汽车的概率值(如0.9,表示有90%的置信度认为这个边界框内的物体是汽车)。 | 识别的输出通常是一个类别标签或者身份标识。比如对于图像中的汽车识别,输出可能是“轿车”这个类别名称;对于人脸识别,输出可能是人名或者对应的身份编号等。同时,可能也会有一个置信度分数来衡量识别结果的准确性。 | 分割的输出是一个标记图,其中每个像素都被分配了一个标签,表示它属于哪个物体或区域。例如,在一张分割后的图像中,代表天空的像素可能被标记为1,代表草地的像素可能被标记为2,代表建筑物的像素可能被标记为3等。这种像素级别的标注提供了比检测更精细的物体信息。 |
一、具体任务
输入
图像数据:包含分格餐盘及盘中食物的彩色图像。
图像包括不同形状材质的凹凸餐盘(如方形/圆形分格餐盘、不锈钢/塑料分格餐盘等)、各类食物(包括混合食物、液体及半流质食物等)、不同的光线反射(强光、弱光、光斑等)以及餐盘表面存在污渍和残渣的情况。

输出
边界框(x,y,w,h)+类别标签(class)+置信度(convenience)
- 边界框信息:针对每个检测到的食物(不以餐盘格为边界框),输出其在图像中的二维边界框坐标,通常以(x,y,w,h)的形式表示。
- 类别标签:明确每个边界框对应的类别,如餐盘、具体食物类别(如米饭、青菜、红烧肉等)。
- 置信度分数:为每个检测结果提供一个置信度分数,用于衡量模型对该检测结果的确定程度,分数范围通常在 0 - 1 之间,越接近 1 表示置信度越高。
二、面临挑战
(一)复杂的餐盘形状
- 餐盘的凹凸结构会导致食物轮廓被遮挡或变形,使得准确确定食物边界框变得困难。例如,深凹槽可能会隐藏部分食物,凸起边缘可能使食物边缘看起来不完整。
- 餐盘边界的不规则性和复杂形状容易干扰目标检测,传统方法容易将餐盘边缘误判为食物边界,导致边界框定位不准确。
(二)食物混合问题
- 当食物混合在一起,如拼盘菜或食物堆叠时,食物之间的界限模糊,这给准确区分不同食物类别并分别绘制边界框带来挑战。
- 混合食物的特征相互交织,使得模型难以准确提取每个食物的独特特征,从而影响分类和检测的准确性。
(三)光线及环境因素
- 光线在餐盘表面的反射可能导致图像曝光过度或产生光斑,这会使图像部分区域的像素值异常,干扰模型对食物和餐盘特征的提取。
- 不同的拍摄角度会使餐盘和食物出现透视畸变,导致目标的形状和尺寸在图像中发生变化,增加了模型学习和识别的难度。
- 光线不足或不均匀会使图像对比度降低,边界不清晰,影响模型对目标的检测和定位。
(四)特殊场景需求
- 液体及半流质食品在凹凸餐盘中容易流动,其形状不固定,难以确定稳定的边界框,并且它们的外观特征与固体食物有较大差异,对模型的适应性提出了挑战。
- 餐盘表面的污渍及残渣容易与食物混淆,模型可能将其误判为食物,从而影响检测的准确性。
三、当前领域的经典方法和最新方法 benchmark
(一)经典方法
- 滑动窗口 + 手工特征 + 分类器:通过在图像上滑动固定大小或不同大小的窗口,提取窗口内图像的手工特征,如 SIFT(尺度不变特征变换)、HOG(方向梯度直方图)等。然后将这些特征输入到分类器(如 SVM - 支持向量机)中进行分类,判断窗口内是否包含目标(餐盘或食物)。在凹凸餐盘识别中,该方法计算量大,对复杂形状和多样场景的适应性较差,难以准确检测和分类。
- 基于深度学习的两阶段目标检测模型 - Faster R - CNN:第一阶段通过区域提议网络(RPN)生成可能包含目标的候选区域,第二阶段对候选区域进行分类和边界框回归。在凹凸餐盘检测中,RPN 能够生成大量候选区域,但对于复杂的餐盘和食物形状,候选区域的质量和准确性有待提高,且模型计算复杂,检测速度较慢。
(二)最新方法
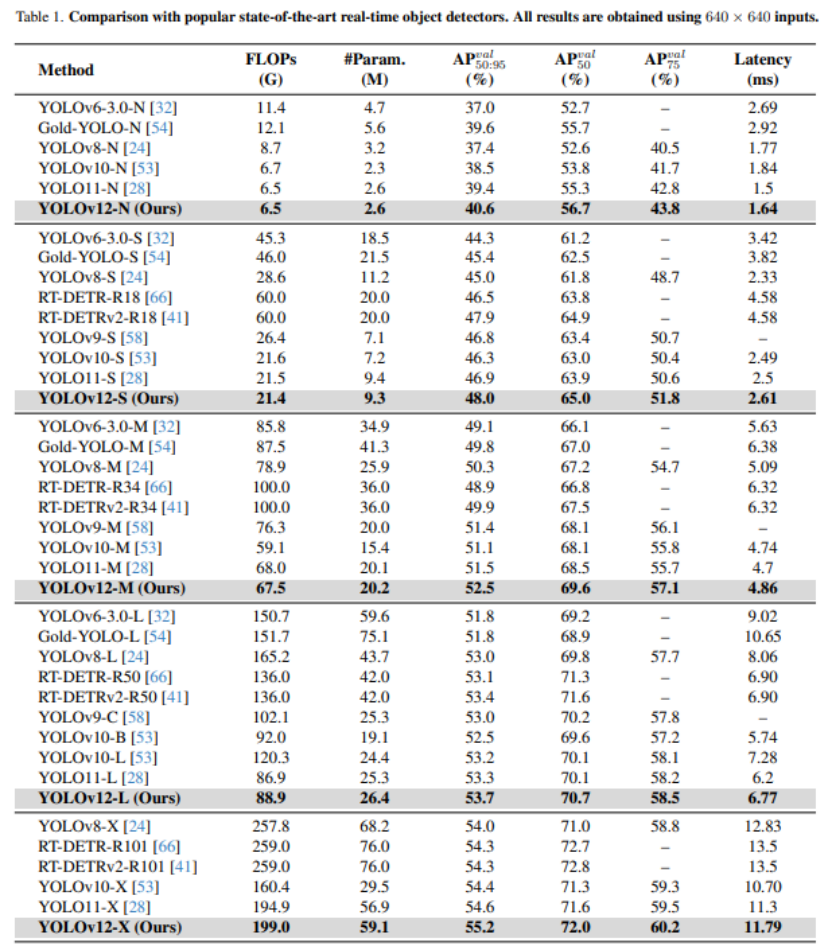
- 单阶段目标检测模型 - YOLO 系列(如 YOLOv5、YOLOv7):将目标检测视为一个回归问题,直接在图像上预测边界框的位置和类别概率,检测速度快。在凹凸餐盘识别任务中,通过优化网络结构和训练策略,对不同形状的餐盘和食物有一定的适应性,但在处理复杂场景(如严重的光线干扰、高度混合的食物)时,检测精度仍有提升空间。
- 基于 Transformer 的目标检测模型 - DETR(Detection Transformer):引入 Transformer 架构,通过自注意力机制对全局图像信息进行建模,无需生成大量候选区域,简化了检测流程。在凹凸餐盘检测中,对复杂场景和目标的上下文理解有一定优势,但模型训练时间长,对硬件要求高。
(三)benchmark 对比指标
通常使用平均精度均值(mAP)、准确率(Precision)、召回率(Recall)、F1 值以及检测速度(FPS - Frames Per Second)等指标来对比不同方法的性能。在凹凸餐盘识别任务中,mAP 能综合反映模型在不同类别和不同置信度下的检测精度;准确率衡量正确检测的比例;召回率表示实际目标被检测到的比例;F1 值是准确率和召回率的调和平均数,能更全面地评估模型性能;检测速度则影响模型在实际应用中的实时性。
四、技术路线
(一)数据预处理
- 图像增强:对输入图像进行多种增强操作,包括旋转(±30° 范围内随机旋转)、缩放(0.8 - 1.2 倍随机缩放)、翻转(水平和垂直翻转)、亮度和对比度调整(随机调整亮度和对比度在一定范围内)。通过这些操作增加数据的多样性,提高模型的鲁棒性。
- 图像归一化:将图像的像素值归一化到 [0, 1] 或 [-1, 1] 范围内,使不同图像的数据分布一致,有助于模型的训练和收敛。
(二)模型选择与改进
- 选择 YOLOv7 作为基础模型,因为其在检测速度和精度上有较好的平衡,且具有灵活的网络结构可进行改进。
- 改进网络结构:
- 在骨干网络中增加注意力模块,如 CBAM(Convolutional Block Attention Module),使模型更加关注凹凸餐盘和食物的关键特征,增强对复杂形状和场景的特征提取能力。
- 针对液体及半流质食物难以检测的问题,在特征金字塔网络(FPN)中增加特定的特征融合层,融合不同尺度下对液体和半流质食物敏感的特征,提高对这类特殊食物的检测能力。
(三)训练策略
- 多尺度训练:在训练过程中,随机调整输入图像的大小,使模型适应不同分辨率下的目标检测,进一步提高模型的泛化能力。
- 损失函数优化:除了标准的分类损失(交叉熵损失)和回归损失(CIoU Loss - 完整交并比损失)外,针对餐盘和食物检测的特点,增加一个边界框约束损失。该损失用于约束边界框的形状和位置,使其更符合餐盘和食物的实际情况,减少误检和漏检。
- 训练数据扩充:收集更多不同场景、不同类型的凹凸餐盘和食物图像,同时人工合成一些包含特殊情况(如极端光线条件、复杂食物混合)的图像,增加训练数据的多样性和复杂性。
(四)模型评估与优化
- 定期评估:在训练过程中,每隔一定的训练轮数,使用验证集对模型进行评估,监控 mAP、准确率、召回率等指标的变化。
- 模型优化:根据评估结果,调整模型的超参数,如学习率、权重衰减等。如果发现模型在某些特定场景(如光线反射严重的场景)下性能较差,可以针对性地增加这类场景的数据进行重新训练,或者调整模型结构和损失函数,以提高模型在这些场景下的性能。
- 集成学习:训练多个不同初始化参数的模型,然后采用投票或加权平均的方式对这些模型的检测结果进行融合,进一步提高检测的准确性和稳定性。