模式识别-Ch9-数据聚类
Ch9 数据聚类

[TOC]
距离与相似性度量

设
| 距离度量 | 对应公式 |
|---|---|
| Minkowski距离 | |
| 曼哈顿距离(城市距离) | |
| 欧式距离 | |
| 切比雪夫距离 | |
| Mahalanobis距离(马氏距离) |

K-means
无监督学习
K-means算法步骤
算法复杂度:每次迭代的计算复杂度:
- 为每个点分配到最近的中心点:需要计算所有点到每个中心的距离,复杂度为
。 - 更新每个簇的中心:对每个簇内的点计算均值,复杂度为
。
输入:N 个样本:
,每个样本 是 维的。K:划分的簇数。 初始化:初始化 K 个簇的中心:
,每个 。 - 通常这些中心是随机初始化的,但有更好的初始化方法,例如K-means++(可以提高算法收敛速度和稳定性)。
迭代步骤:
(Re-)分配样本:对每个样本
,找到最近的簇中心: 表示欧几里得距离的平方。每个样本 会被分配到距离最近的簇 。 更新簇中心:对每个簇
,重新计算其中心为: |C_k| $是第 k 个簇中样本的个数。
重复:重复上述两步(分配和更新),直到算法收敛。即:当簇的中心或“损失”(通常指平方误差的总和)不再显著变化时,算法停止。
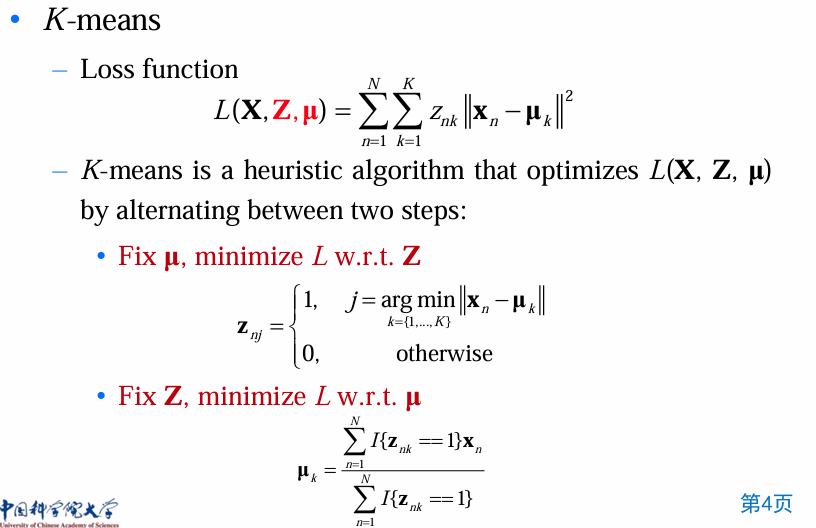
损失函数
K个簇的中心:
:若数据点 属于簇 ,则 ;否则 。 - one-hot encoding:
是 数据点属于哪个簇的独热编码.
单个点
全部样本点的损失是单点损失的累加:
其中,
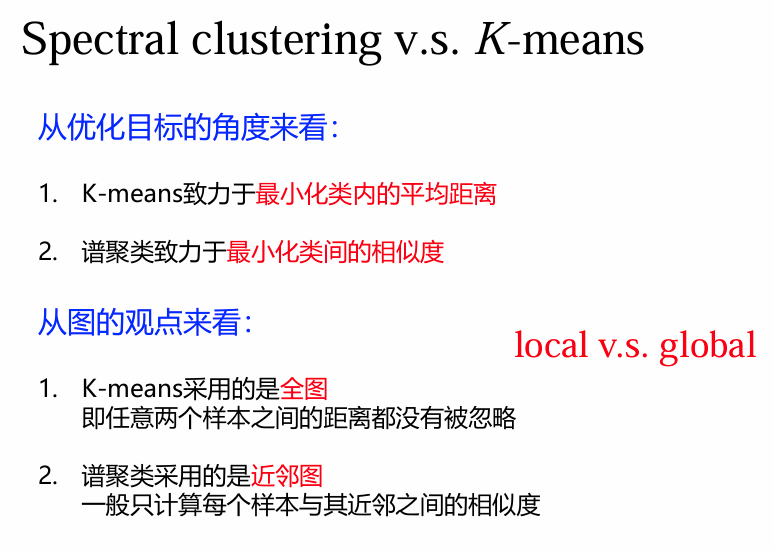
优化目标:最小化上式,即最小化簇内的点到簇中心的平方距离之和。
这是一个 非凸目标函数(non-convex objective function),意味着可能有多个局部最优解。也是NP-hard问题。
K-means 的求解是一个 启发式方法,不能保证找到全局最优解。
优化过程:分步交替优化 (alternating optimization):
- 固定簇中心
,优化点的簇分配 (将每个点分配到最近的簇中心)。 - 固定簇分配
,优化簇中心 (重新计算每个簇的均值)。
K-means 的收敛性
收敛性:
- K-means在有限次迭代后必然收敛(目标函数值不再变化)。
- 但收敛的速度与初始化的好坏有关。
收敛过程:
- 更新点的分配
: - 将
重新分配到最近的簇中心: - 这一步会使得目标函数
不增加,即:
- 将
- 更新簇中心
: - 重新计算每个簇的中心:
- 这一步也会使目标函数
不增加:
- 重新计算每个簇的中心:
- 整体收敛性:因为目标函数
在每次迭代中单调减少,而 有下界 (即大于或等于 0),所以 K-means 最终会收敛到一个局部最优解。
局限性
硬分配问题:K-means是硬分配,每个点要么完全属于一个簇,要么完全不属于,这样可能忽略了实际中的模糊性。而软分配(如高斯混合模型GMM)可以用概率分配点到簇中。
- 示例:点
可能属于3个簇的概率分别是0.7、0.2、0.1。
- 示例:点
类大小不均的问题:K-means只在类大小差不多时表现良好。对于大小非常不均的簇,可能会造成问题。
- 形状限制问题:K-means只适用于圆形或凸状的簇,对于非凸簇形状的分割表现不好。
- 解决方法:Kernel K-means或者Spectral Clustering可以解决非凸形状问题。
K值选择
K-means是启发式算法,初始化的中心点对最终结果有很大影响。
问题:如果初始点选择得不好,可能会陷入局部最优,如某些点会错误地分配到不合适的簇中。
解决方案:
- 使用K-means++等初始化方法(对初始点进行优化)。
- 引入基于方差的split/merge操作。
or
方法1:交叉验证:通过交叉验证选择最优的K值。
- 问题:如何定义优化目标?常用的是簇内误差和簇间距离。
方法2:专家判断:让领域专家观察聚类结果,判断是否合适。
- 问题:如何展示结果?高维空间中的数据点可能难以可视化。
方法3:肘部法则(The “knee” solution):
- 绘制不同K值对应的目标函数值(如SSE),选择拐点位置的K值。
- 拐点反映的是增加K值后收益的递减。
总结
算法步骤
K-means是一种无监督聚类算法,用于将数据划分为K个簇。其步骤如下:
- 初始化:随机选择K个点作为初始簇中心(可以用K-means++优化初始化)。
- 迭代过程:
- 分配点到最近的簇:将每个数据点分配到距离最近的簇中心(基于欧几里得距离)。
- 更新簇中心:重新计算每个簇内所有点的均值,作为新的簇中心。
- 停止条件:当簇中心不再改变或目标函数收敛时,停止迭代。
损失函数
K-means的目标是最小化簇内平方误差(SSE),其损失函数为:
其中,
影响K-means算法的因素
1. 初始中心点:初始中心点选择对K-means收敛到全局最优还是局部最优有很大影响。
- 优化方法:使用K-means++,通过分布式选择初始点来提高性能。
2. K值的选择:K值直接决定了聚类的数量。
- 选择方法:
- 肘部法则(The elbow method):通过观察SSE随K变化的拐点来确定。
- 交叉验证(Cross-validation):根据验证误差选择最优K值。
- 专家判断:结合领域知识手动选择K值。
3. 数据分布:数据点的密度、形状、类间距离都会影响K-means效果。
- 适用场景:K-means在类大小相等、分布均匀、簇为凸形时效果最好。
- 问题场景:当簇的形状为非凸时(如月牙形分布),K-means表现较差。
4. 距离度量:K-means默认使用欧几里得距离,如果数据特征不同或含噪声,需要归一化处理。
优缺点分析
优点:K-means假设数据点是紧凑、均匀分布的簇。K-means倾向于处理形状规则的簇,对紧凑性要求高。
Compactness(紧凑性):目标是优化数据点与簇中心之间的紧凑性。
收敛性保证:算法必然在有限次迭代后收敛(虽然可能收敛到局部最优)。
缺点
- 需要指定K值:K值需要事先给定,难以确定最佳K值。
- 对初始中心敏感:不同的初始中心可能导致不同的聚类结果,可能陷入局部最优。
- 对簇形状限制:只能处理凸形簇,无法处理非凸簇或复杂形状的簇。
- 对噪声和异常值敏感:噪声点可能会显著拉偏簇中心。
- 难以处理类大小不均的问题:在类大小差异较大的情况下,较小的类可能被忽略。
改进方向
- 优化初始中心:使用K-means++或其他启发式方法选择初始点。
- 扩展为非凸形状:使用Kernel K-means或Spectral Clustering。
- 处理噪声数据:引入模糊聚类(如Fuzzy C-means)来实现软分配。
- 自动选择K值:使用肘部法则、轮廓系数等自动选择合适的K值。
分级聚类(Hierarchical Clustering)
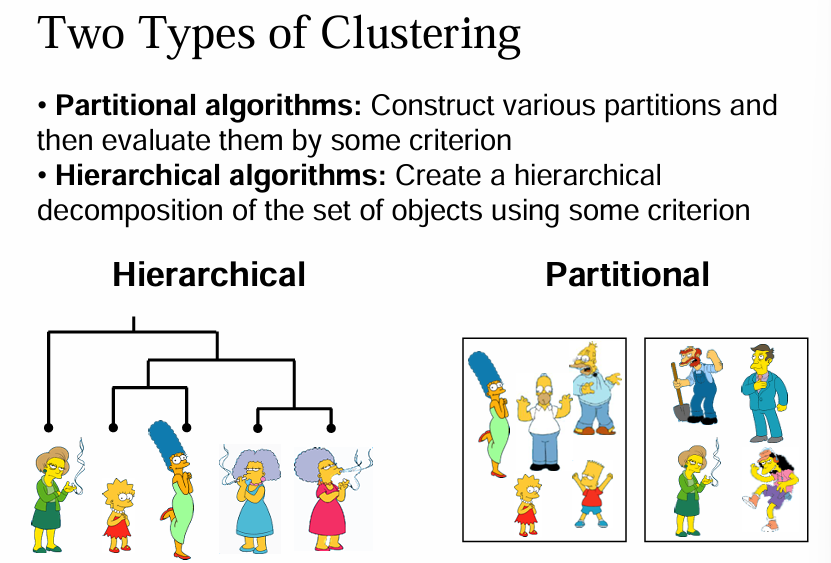
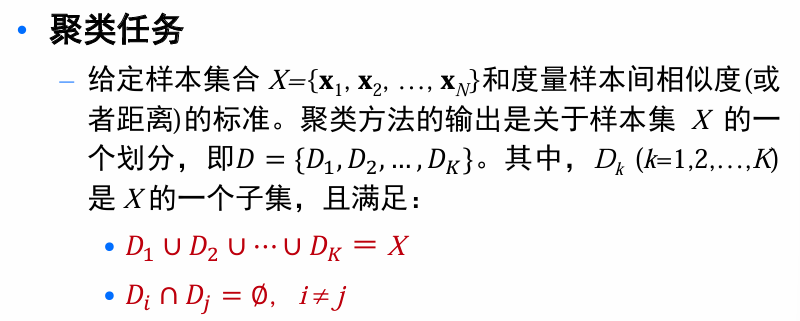
分级聚类思想:对于 n个样本,极端的情况下,最多可以将数据分成n类;最少可以只分成一类,即全部样本都归为一类。
- 凝聚的层次聚类(自底向上):将每个样本作为一个簇,然后根据给定的规则逐渐合并一些样本,形成更大的簇,直到所有的样本都被分到一个合适的簇中。
- 分裂的层次聚类(自顶向下):将所有的样本置于一个簇中,然后根据给定的规则逐渐细分样本,得到越来越小的簇,直到某个终止条件得到满足
这个很像昨天(2024.12.10)上多元统计分析介绍的:
好巧,都是在讲聚类分析:D)
分级聚类的两个核心问题:
- 度量样本之间的距离(相似性)
- 度量两个簇之间的距离(相似性)
度量样本之间的距离(相似性)?
- 距离:欧式距离、马氏距离、曼哈顿距离、匹配距离…
- 相似性:相关系数、高斯相似性函数、余弦相似度、距离倒数…
簇与簇之间的距离:
| 距离类型 | 公式 | ||||||
|---|---|---|---|---|---|---|---|
| 最小距离 | $d_{\text{min}}(D_i, D_j)=\min_{x\in D_i, x’\in D_j}\ | x - x’\ | $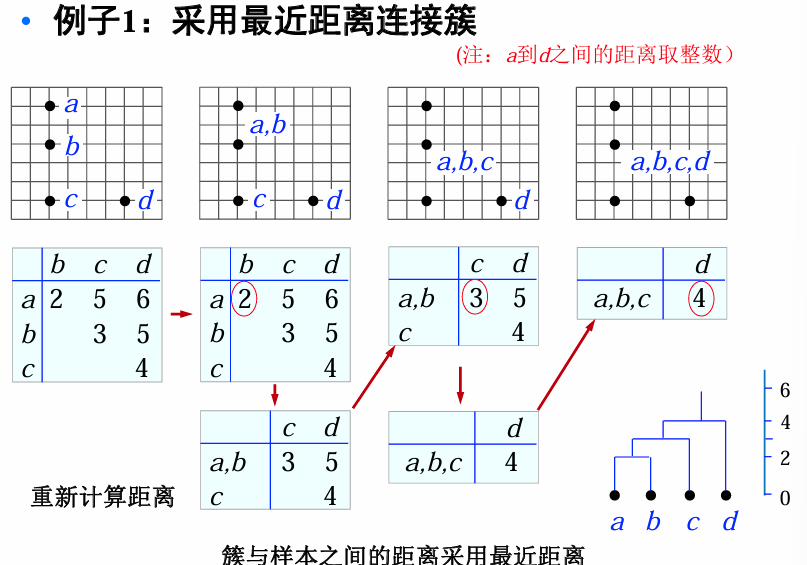 |
||||
| 最大距离 | $d_{\text{max}}(D_i, D_j)=\max_{x\in D_i, x’\in D_j}\ | x - x’\ | $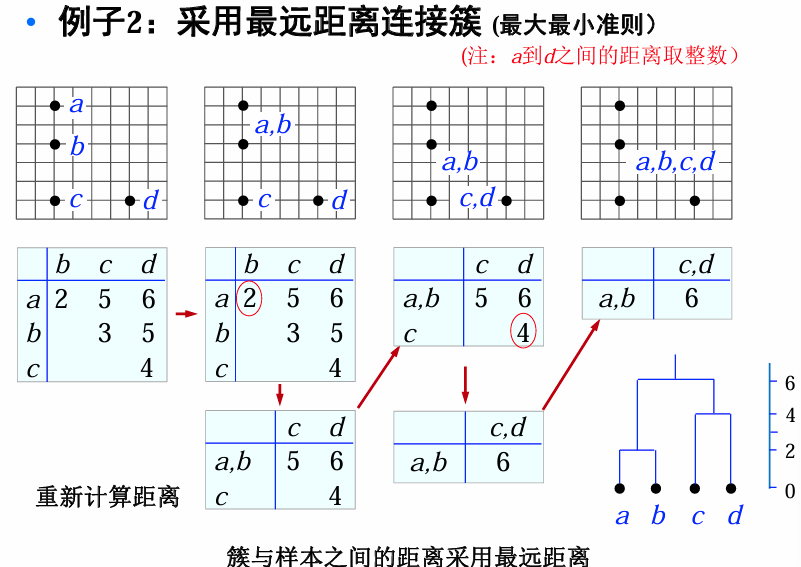 |
||||
| 平均距离 | $d_{\text{avg}}(D_i, D_j)=\frac{1}{\ | D_i\ | \ | D_j\ | }\sum_{x\in D_i}\sum_{x’\in D_j}\ | x - x’\ | $ |
| 中心距离 | $d_{\text{mean}}(D_i, D_j)=\ | m_i - m_j\ | $ |
例:最小距离准则
有如下6个样本:
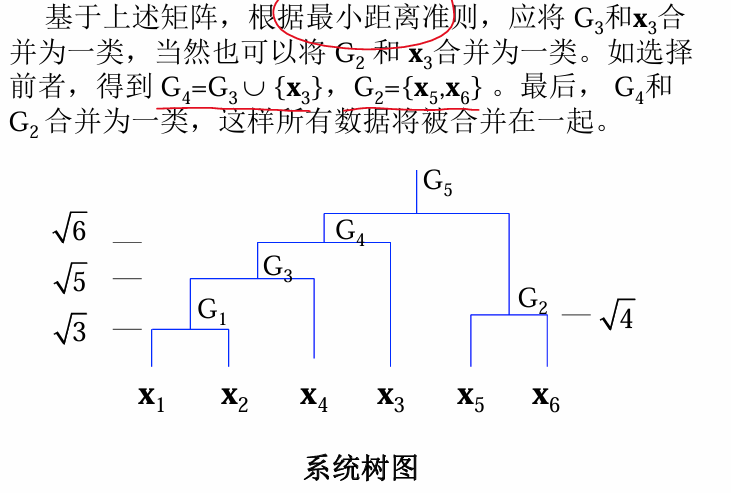
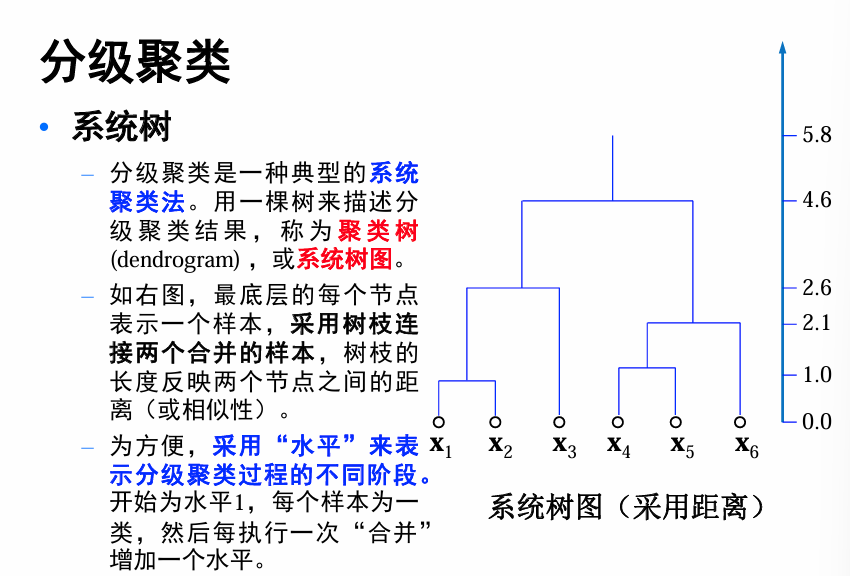
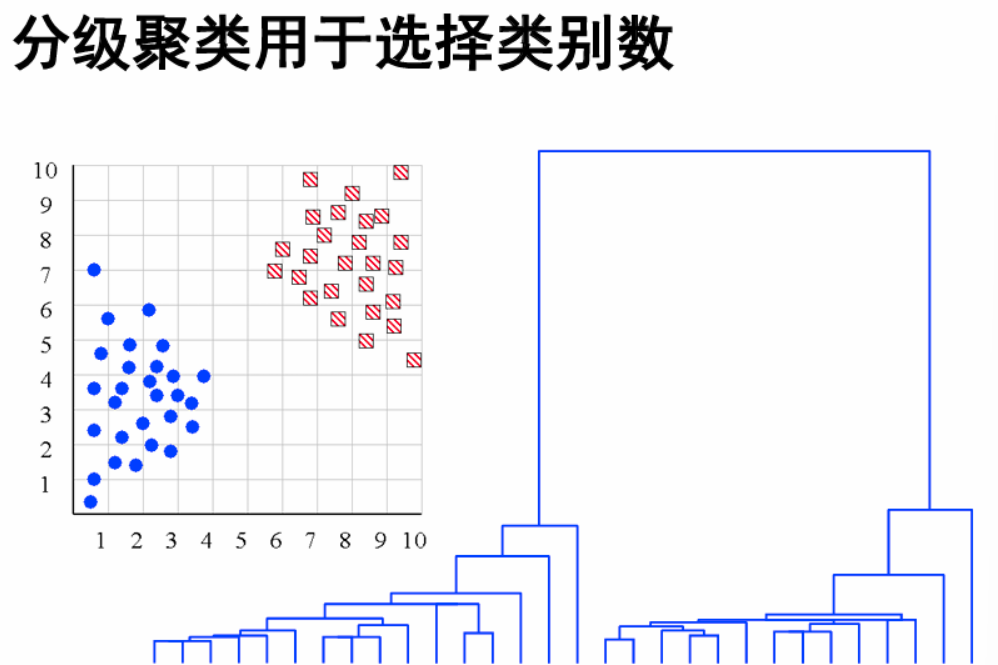
分级聚类好处
根据观察聚类树,选择合适的类别数。(而不是事先指定)
根据这个树:最后一次合并的时候得到的距离,相较于之前进行聚类的距离来说,比较大,暗示可能是两类。
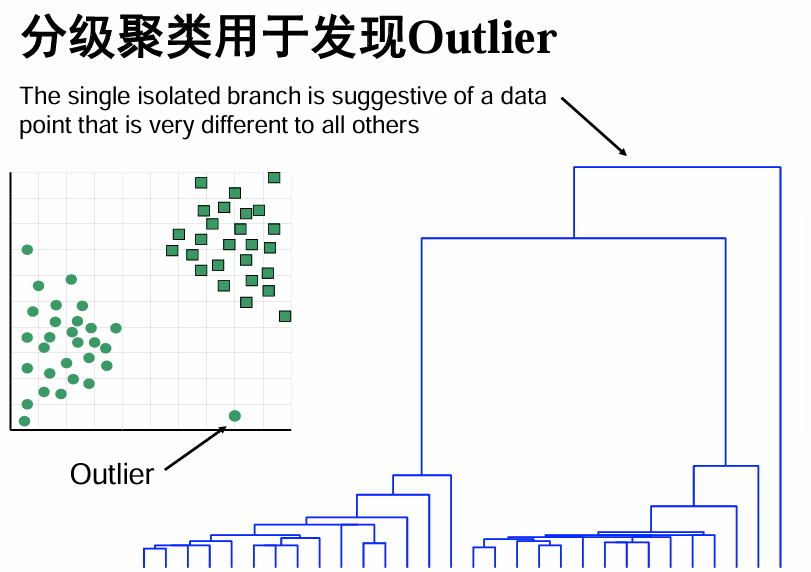
- 发现野点
| Summary | 详细说明 |
|---|---|
| 1. 无需事先指定簇的数量 | 用户可以在生成的层次树形结构(树状图,dendrogram)上根据实际需求来决定截断点,从而得到期望的簇数。 |
| 2. 层次结构直观匹配人类直觉 | 层次聚类会逐步将样本聚合(或拆分),最终构建出一个层次分明的树形结构。 |
| 3. 扩展性较差,时间复杂度高 | 层次聚类一般有至少 O(n²) 的时间复杂度(n 为数据点个数)。 |
| 4. 存在局部最优问题 | 本质上是一种启发式搜索过程,从局部合并(或分裂)开始,不能保证找到全局最优的聚类结构。它可能在局部最优的决策上停滞,从而影响最终结果的质量。 |
| 5. 结果解释具有主观性 | 虽然层次聚类能给出一个清晰的树状层次结构,但怎样选择合适的层次截断点来定义簇的数量和分布往往依赖经验、领域知识或特定的评价指标。 |
谱聚类(Spectral Clustering)
基本原理、影响因素、步骤
谱学习方法:广义上讲,任何在学习过程中应用到矩阵特征值分解的方法均叫谱学习方法,比如主成分分析(PCA)、线性判别分析(LDA)、流形学习中的谱嵌入方法、谱聚类等等。
谱聚类:谱聚类算法建立在图论的谱图理论基础之上,其本质是将聚类问题转化为一个图上的关于顶点划分的最优问题。谱聚类算法建立在点对相似性基础之上,理论上能对任意分布形状的样本空间进行聚类。
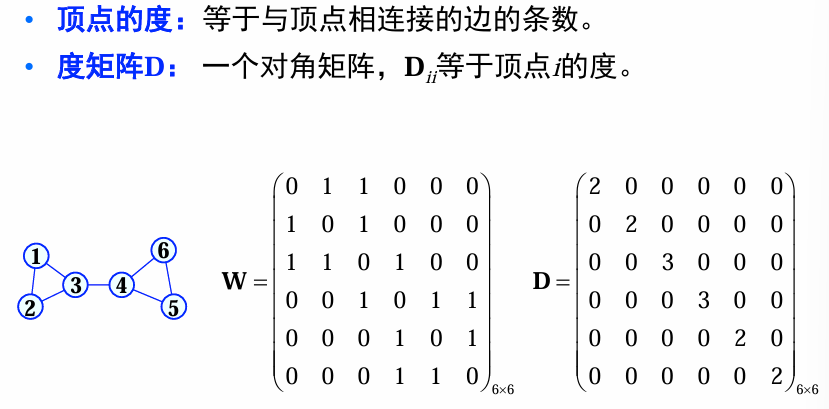
图论基本概念

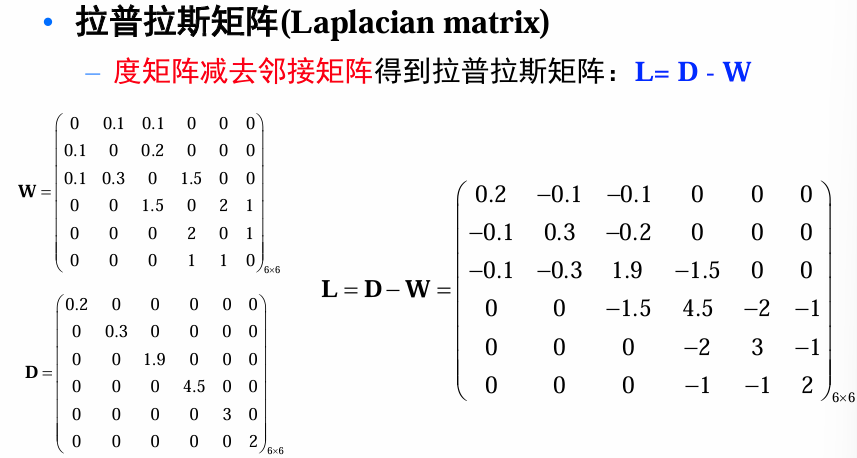
对于这个显然对称(W对称-D对角)的拉普拉斯矩阵有两种归一化方式:
如果在任务中需要对称性或者特征分解,选择对称归一化;如果需要建模随机游走或信息传播过程,则使用非对称归一化。
- 对称归一化(Symmetric Normalized Laplacian):
- 非对称归一化(Random Walk Normalized Laplacian):
| 特性 | 对称归一化(Symmetric) | 非对称归一化(Random Walk) |
|---|---|---|
| 归一化方式 | ||
| 矩阵特性 | 对称 | 非对称 |
| 适用场景 | 谱聚类、图神经网络 | 随机游走、转移概率建模 |
| 特性平衡 | 平衡了节点间的影响 | 偏重节点的方向性和流动性 |
| 数学操作复杂度 | 更易处理,特征值分解简单 | 更复杂,适合概率模型 |
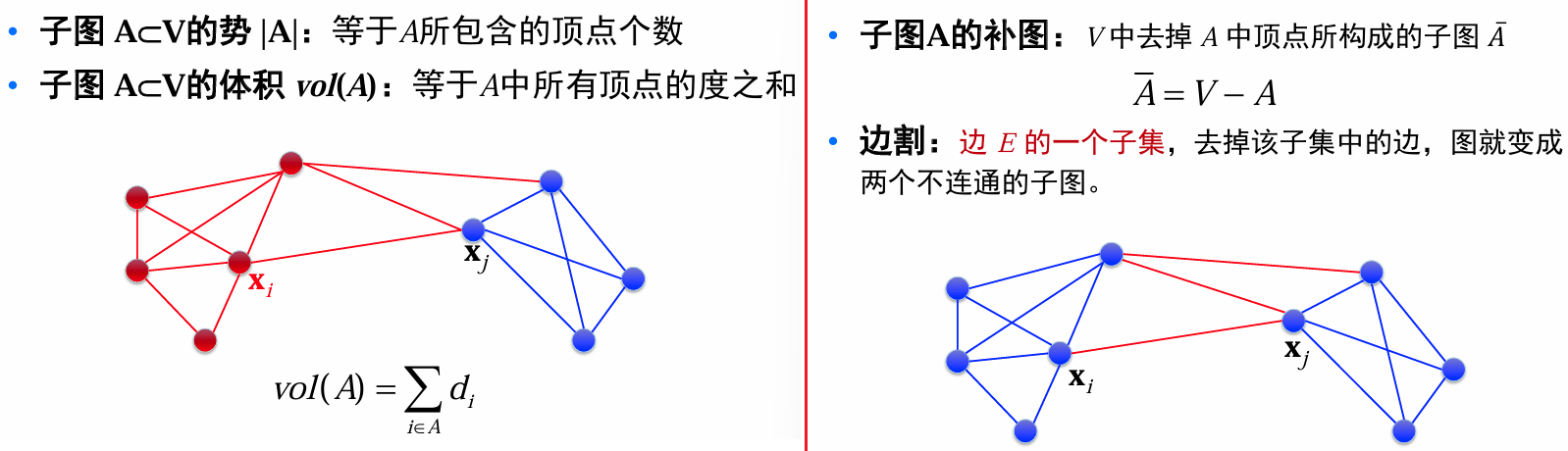
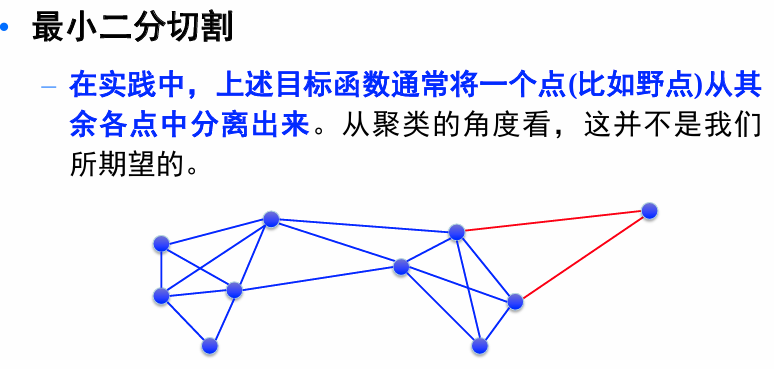
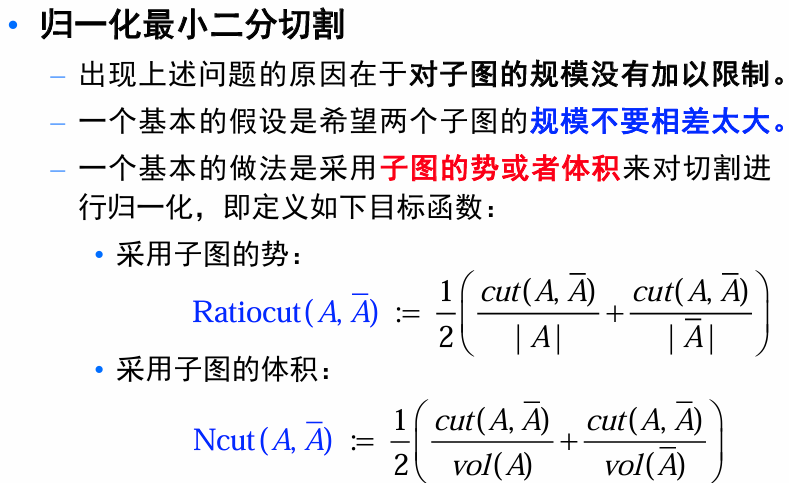
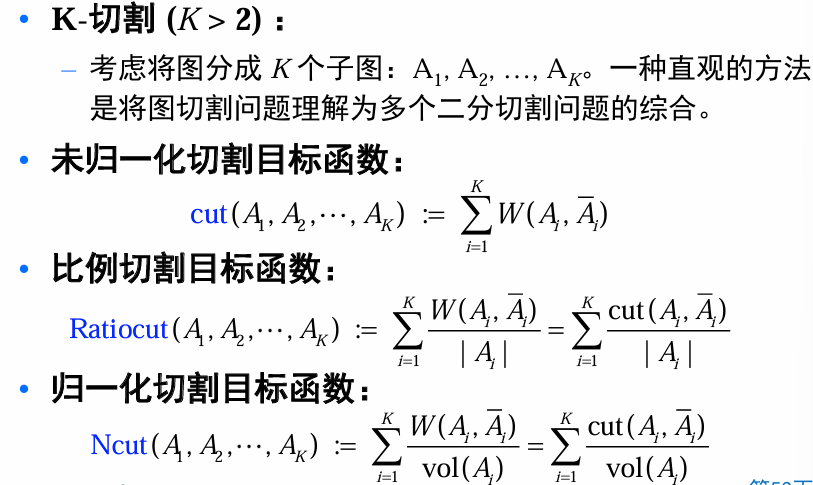
图分割(Graph partitioning)
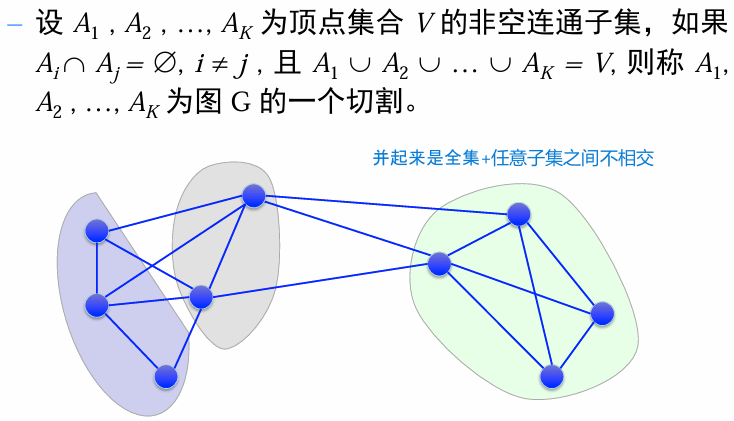
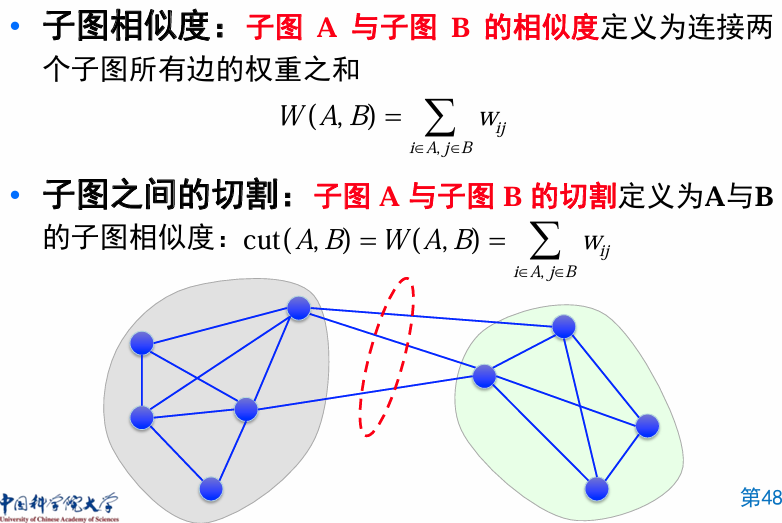
Mincut Problem:即如何将图分割成 K 个子集
其中,
谱聚类
核心思想:
- 使用相似性图(Similarity Graph)来表示数据点之间的关系。
- 构造图的拉普拉斯矩阵(Laplacian Matrix),对其进行特征值分解,提取重要的特征向量作为新的数据表示。
- 将这些特征向量视为降维后的特征空间,再在特征空间中应用传统的聚类算法(如K-means)。
主要算法
主要步骤:
- 构建相似性图W、计算度矩阵(根据W)
- 计算拉普拉斯矩阵:有不同的方法 归一化/未归一化
- 计算前k个特征值对应的特征向量
- K-means聚类:将矩阵 U 的行看作新的数据点,将其视为在 k维空间的嵌入表示。
1. 未归一化的谱聚类算法(Unnormalized Spectral Clustering):
- 构造相似性图并计算未归一化的拉普拉斯矩阵 L。
- 提取拉普拉斯矩阵的前 k 个最小特征值对应的特征向量,组成矩阵 U。
- 每个数据点对应矩阵 U 的一行,在这个新特征空间中使用 K-means 聚类。
2. 归一化的谱聚类算法(Normalized Spectral Clustering) [Shi2000]:
- 基于随机游走拉普拉斯矩阵
。 - 步骤类似,但拉普拉斯矩阵需要归一化以调整权重分布。
3. 改进的归一化谱聚类算法 [Ng2002]:
- 使用对称归一化拉普拉斯矩阵
。 - 特点是对特征向量进一步归一化(行归一化到单位范数),使得特征空间更平衡。
优缺点
谱聚类的目标是基于数据点的连通性(图论中的相似性图)进行聚类。
优点:
谱聚类的连接性很好。谱聚类对环形或其他非凸形状簇的聚类效果更好,而K-means在这种情况下效果较差。
谱聚类能够更好地处理非凸形状的簇,因为它基于图的连通性,而不是欧几里得距离。