模式识别-Ch5-线性判别函数
Ch5 线性判别函数
[TOC]
引言:生成模型 vs判别模型
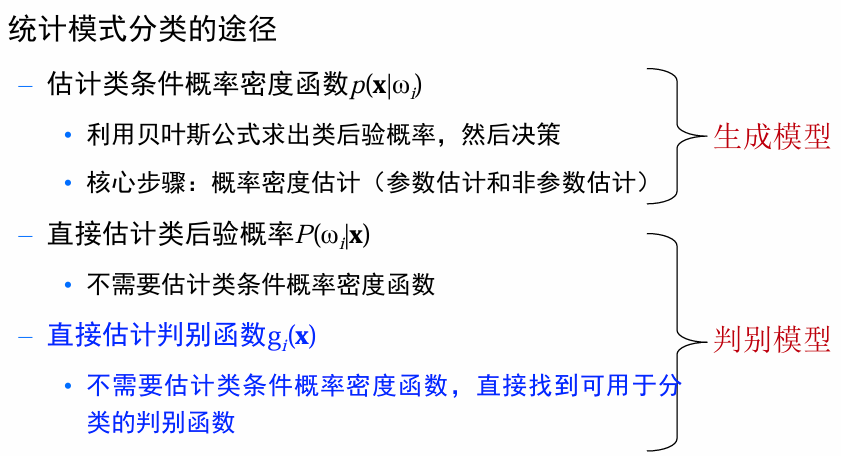
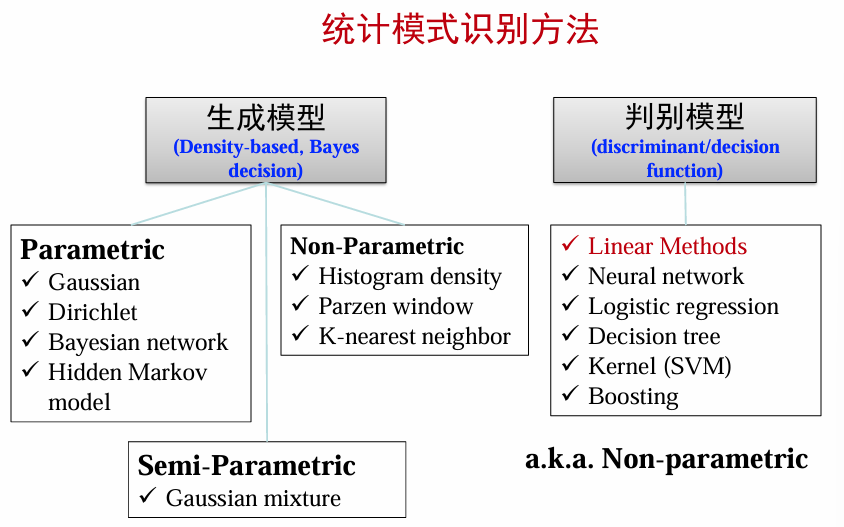
生成模型 vs 判别模型
在分类问题中,生成模型和判别模型是两种不同的建模方法:
| 生成模型 | 判别模型 |
|---|---|
| 直接建模类条件概率或联合分布 | 直接建模后验概率 |
| 通过贝叶斯公式计算后验概率 |
不需要假设数据的分布形式,直接关注分类任务 |
| 示例:朴素贝叶斯、隐马尔可夫模型(HMM) | 示例:支持向量机、线性判别分析、神经网络 |
| 适用于需要生成数据的场景(例如语音识别、自然语言处理) | 适合直接分类任务,通常分类性能较好 |
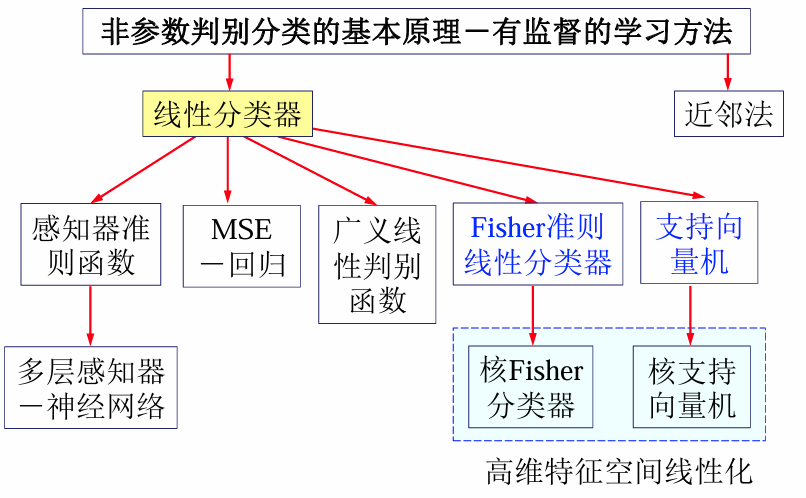
判别模型分类
判别模型根据复杂性和数据分布特点,可以分为以下几类:
| 线性判别函数 | 广义线性判别函数 | 非线性模型 | 非参数模型 |
|---|---|---|---|
| 假设数据是线性可分的,构造一个超平面来划分不同类别。 | 将数据映射到高维空间,使非线性问题变成线性问题。 | 不依赖数据的线性假设,适合处理复杂分布的数据。 | 不假设数据的分布形式。 |
| 简单、高效,适合高维空间。 | 使用核函数(kernel function)来处理非线性分布。 | 学习能力强,但计算复杂度较高。 | 分类直接依赖于训练样本,适合小样本场景。 |
| 感知器、支持向量机、Fisher线性判别函数 | 核学习机 | 神经网络、决策树 | K近邻分类、高斯过程 |
假设有n个d维空间中的样本,每个样本的类别标签已知,且一共有c个不同的类别。
- 学习问题:假定判别函数的形式已知,采用样本来估计判别函数的参数。
- 推理、预测问题:对于给定的新样本
,用判别函数判定 属于 中的哪个类别。
| c>2(one-vs-all) | c=2 | |
|---|---|---|
| 判别函数 | 每个类别对于判别函数 |
|
| 决策准则 |
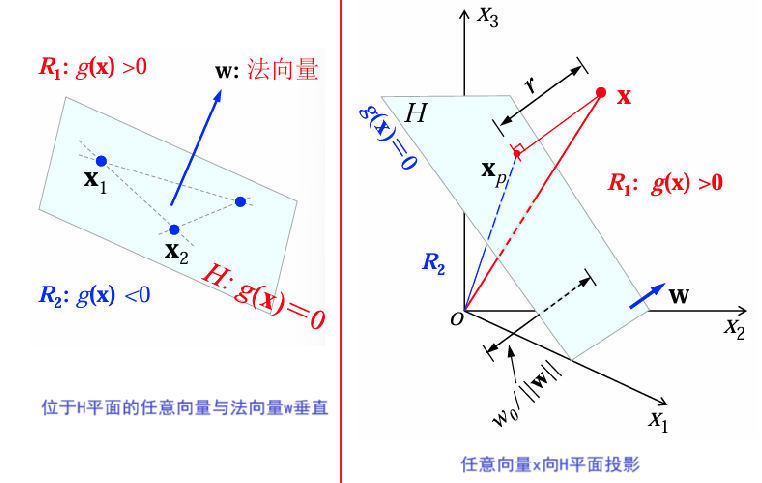
线性判别函数与决策面
线性判别函数
线性判别函数定义为:
:权重向量,决定分类超平面的方向。 :偏移量(阈值),决定超平面的位置。
两类情况下的决策
决策依据判别函数
两类问题中的决策面:
: ,用于将特征空间分为两类区域: : :
超平面
对于位于
内的任意向量,其法向量满足: 对于任意样本/向量
,将其向决策面内投影,并写成两个向量之和: 是 在超平面 上的投影, 是点 到超平面 的代数距离。若 .
多类问题下决策
在多类分类问题中,通常使用多个二分类器来解决问题。常见策略有:
| 一对多(One-vs-All) | 一对一(One-vs-One) | 多对多 |
|---|---|---|
| 每个类别与其余类别分别构造一个二分类器,共需构造 c 个二分类器。 | 每两个类别配对构造一个二分类器,共需构造 |
—- |
| 预测时:若只有一个分类器的预测为正,其对应类别即为预测结果;若多个分类器的预测为正,则需要比较判别函数值。 | 预测时, 对测试样本使用投票法,预测得票最多的类别。 | 使用纠错编码(Error Correcting Output Codes, ECOC),实现层次化分类。 |
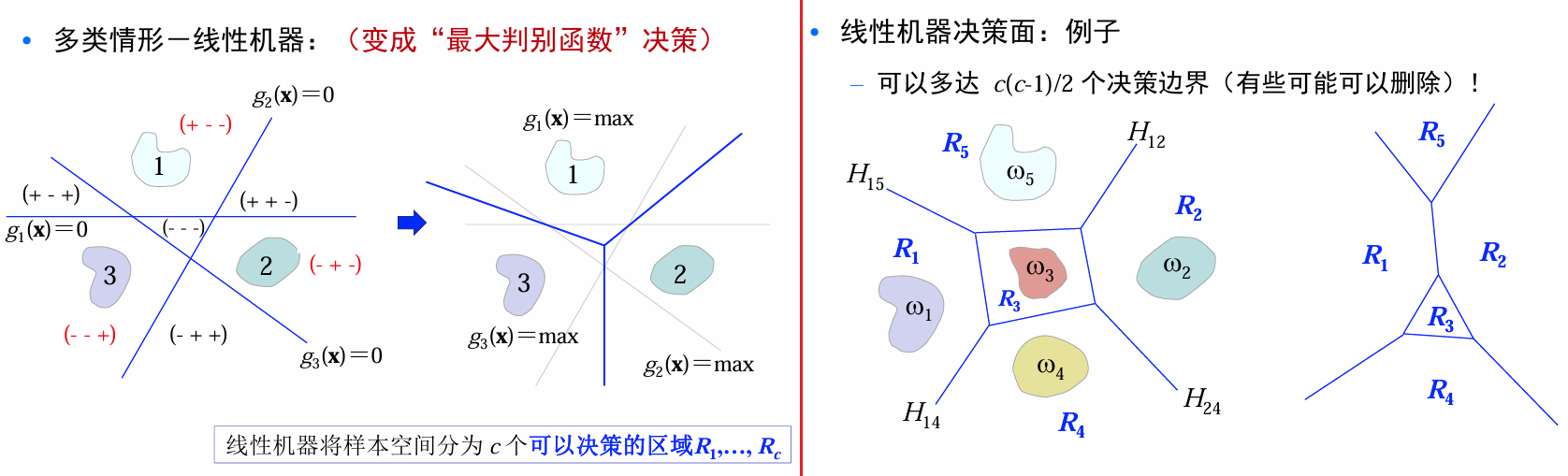
多类情形-线性机器
因为不使用判别函数的函数值、仅仅使用决策面进行分类,one-vs-all\one-vs-one都有可能存在不确定区域。
考虑one - vs - all情形,构建
个两类线性分类器: 对样本
,可以采用如下决策规则(最大判别函数决策): 对
,如果 , 则被分为 类;否则不决策 线性机器将样本空间分为
个可以决策的区域 。
线性决策面优缺点
- 所有的决策区域都是凸的——便于分析
- 所有的决策区域都是单连通的——便于分析
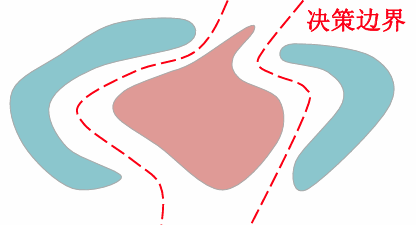
- 凸决策区域:限制分类器的灵活性和精度
- 单连通区域:不利于复杂分布数据的分类(比如:分离的多模式分布)
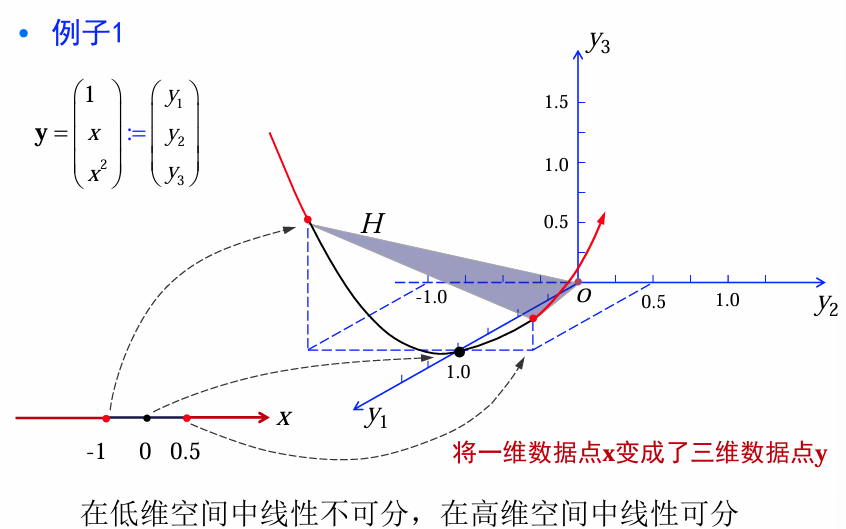
广义线性判别函数
将原来的数据点 x通过一种适当的非线性映射将其映射为新的数据点 y, 从而在新的特征空间内应用线性判别函数方法。
例:二次判别函数
二次判别函数形式:
其中共有
定义如下非线性变换
则有:
其中:
为广义权重向量, 是经由 所变成的新数据点。 - 广义判别函数
对 而言是非线性的,对 是线性的。 对 是齐次的,意味着决策面通过新空间的坐标原点。且任意点 到决策面的代数距离为 。 - 当新空间的维数足够高时,
可以逼近任意判别函数。 - 但是,新空间的维数远远高于原始空间的维数
时,会造成维数灾难问题。
例1: 1-D判别函数
设有一维样本空间
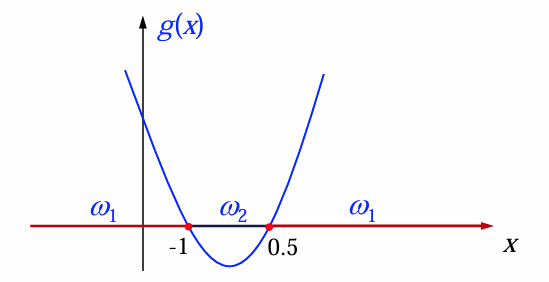
判别函数:
决策规则:
映射关系:
感知准则函数
概念
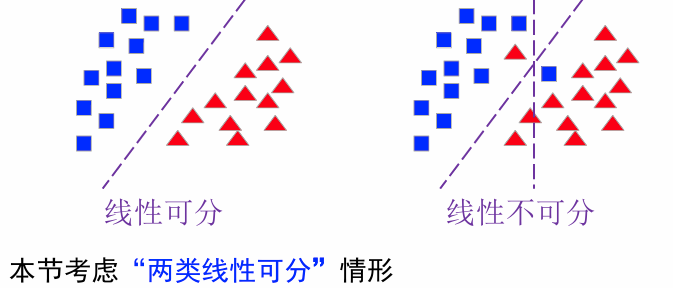
线性可分性:来自两个类别的n个样本
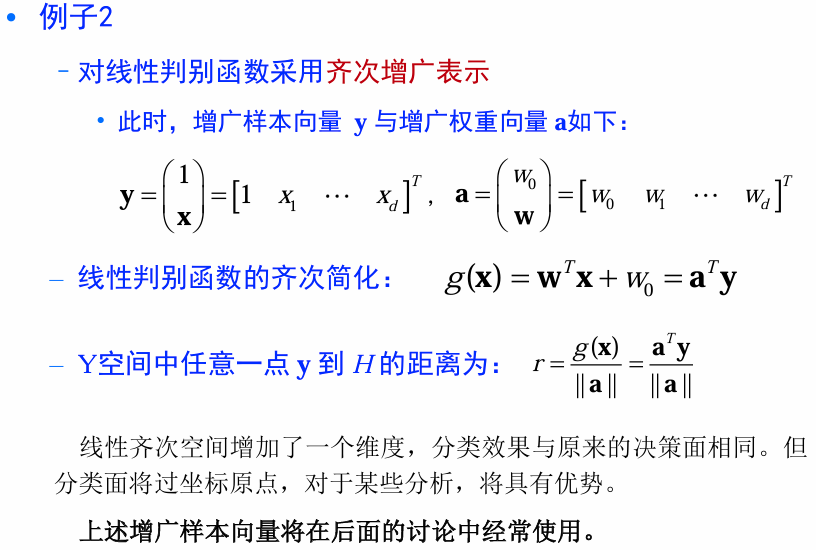
(齐次增广表示)。存在一个权向量 ,对所有 ,均有 ;对所有 ,均有 。

齐次增广->规范化增广
样本规范化:如果样本集是线性可分的,那么将属于
规范化增广样本:1.将所有样本写成齐次增广形式;2.属于
解向量与解区
解向量:线性可分的情况下,满足
解向量
是我们需要找到的“分类方向”,它保证所有样本点都在它的正确一侧。
解区:权向量
- 任何一个样本点
均可以确定一个超平面 ( 是法向量,所有与 垂直的属于 ,且 决定了超平面的方向。) - 如果解向量存在,那必在每个超平面的正侧(
); 个样本将产生 个超平面。每个超平面将空间一分为二。解向量存在于所有超平面正面的交集区域,此区域内的任意向量都是解向量。
限制解区:解向量存在的话,通常不唯一。根据经验越靠近区域中间的解向量,越能对新的样本正确分类,所以引入附加条件来限制解空间。
way1: 寻找单位长度的解向量
,最大化样本到分界面的最小距离。 way2:
, 寻找满足 的最小长度的解向量 , b:margin. 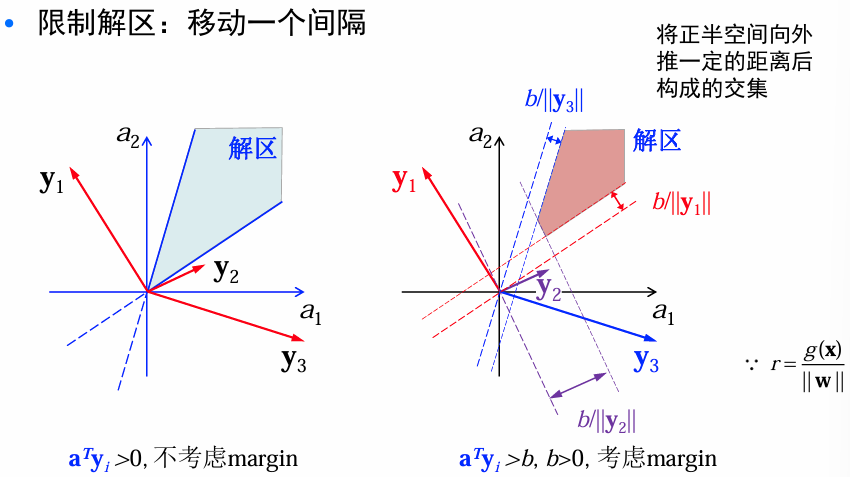
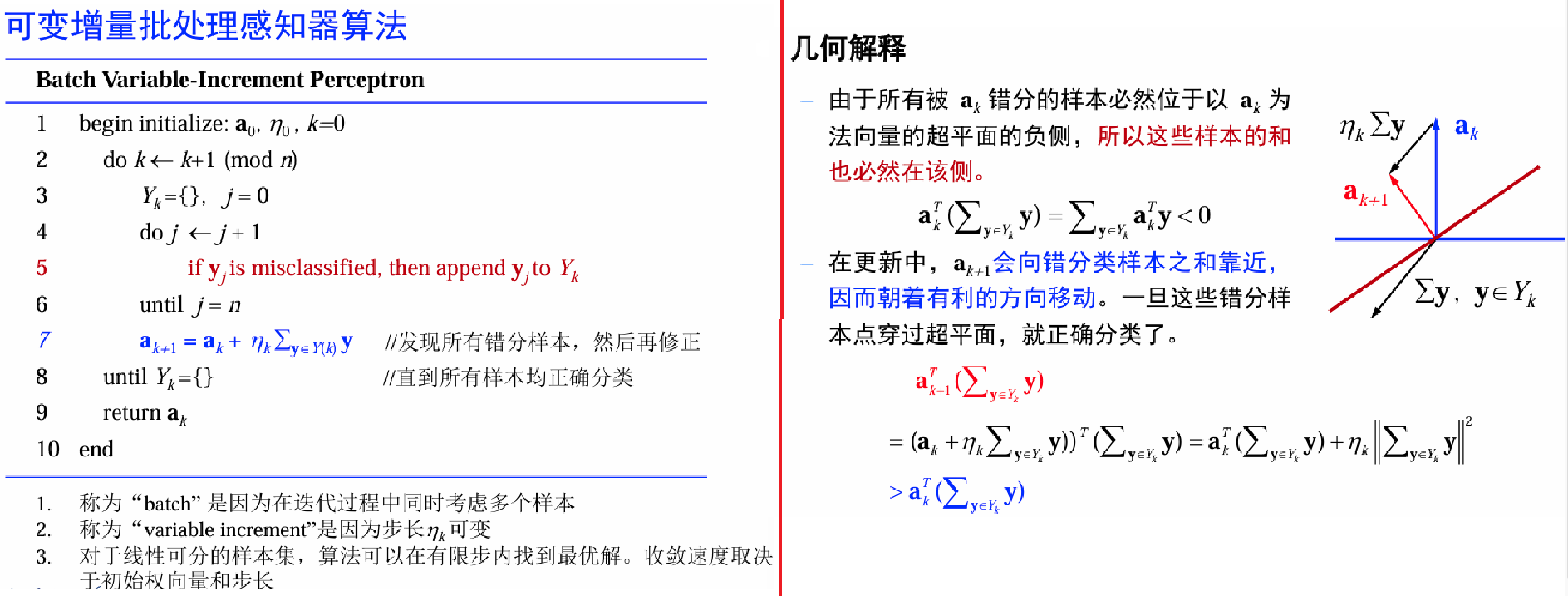
感知准则函数
现在考虑构造解线性不等式
当
被错分: ,使 . 在可分情况下,当且仅当
是空集时 将=0,此时不存在错分样本。
目标:
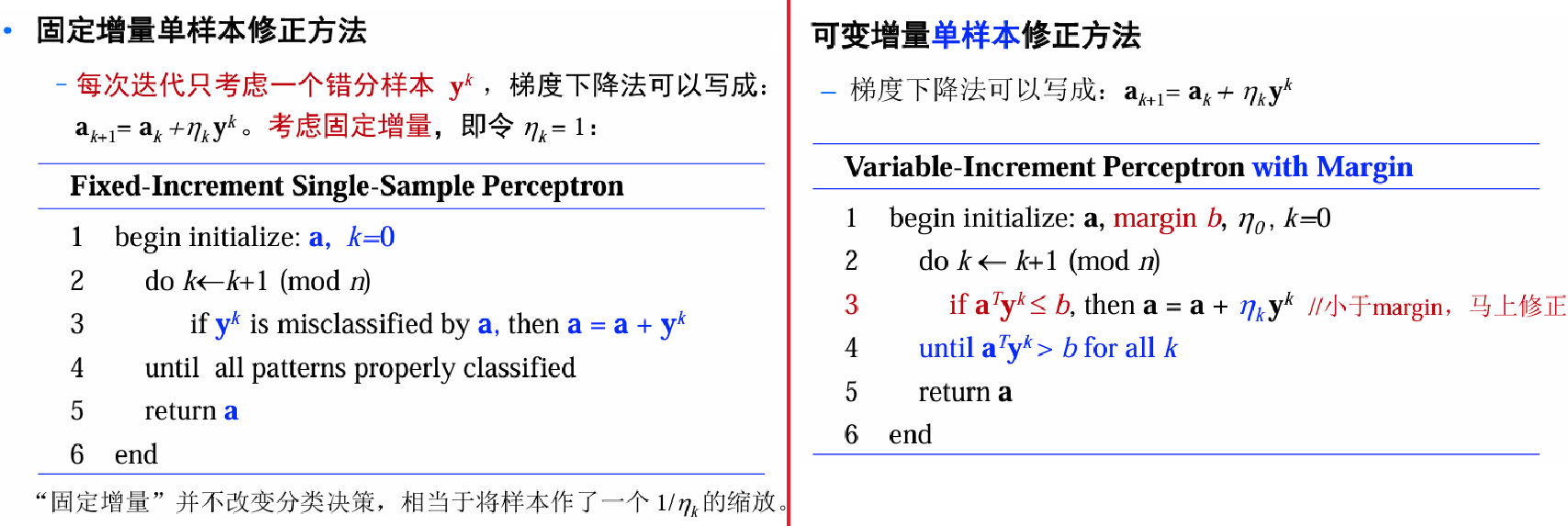
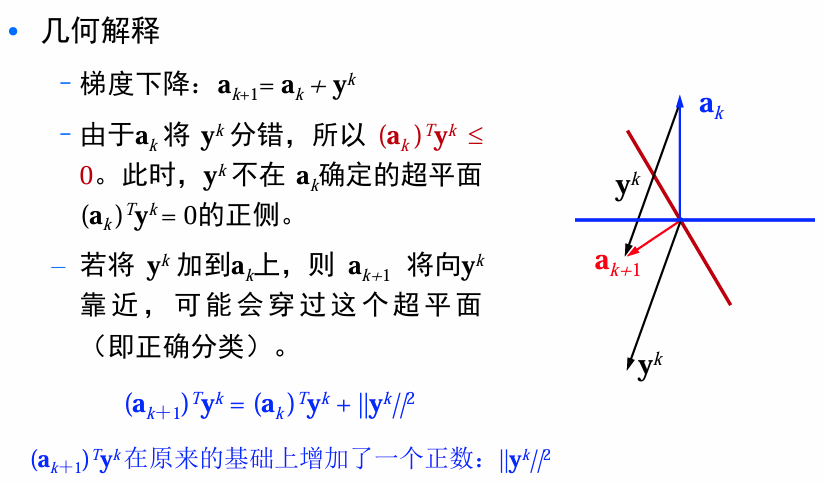
梯度下降更新:
算法收敛性
以固定增量单样本修正方法为例来说明算法的收敛性:
对于权向量
记错分样本序列为
收敛性定理:在样本线性可分的情形下,固定增量单样本权向量修正方法收敛,并可得到一个可行解。
证明思路:设
- 算法每次迭代都会使权向量到解向量的距离减少1个常数C
- 假设
,则dst在经过C次迭代后(计算了足够长的步数),算法收敛。
感觉证明不考,因此略。
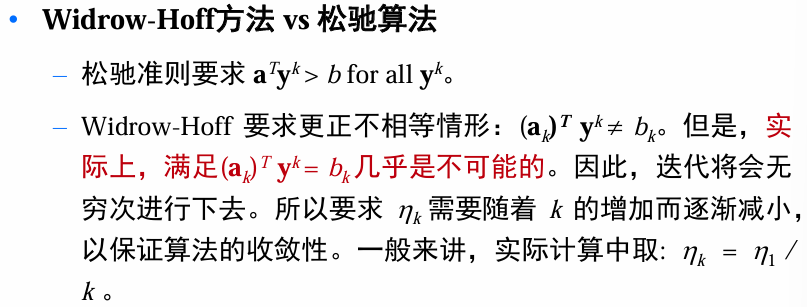
松驰方法
学习准则
在感知函数准则中,目标函数中采用了
| 线性准则 | 平方准则 | 松驰准则 | ||
|---|---|---|---|---|
| $J_r(a)=\frac 1 2\sum_{y\in\mathcal{Y}}(a^Ty-b)^2/\ | y\ | ^2$ | ||
| 分段线性,梯度不连续 | 梯度连续,但目标函数过于平滑,收敛速度很慢。此外,目标和拿书过于受到最长样本的影响。 | 避免了线性准则和平方准则的缺点。 |
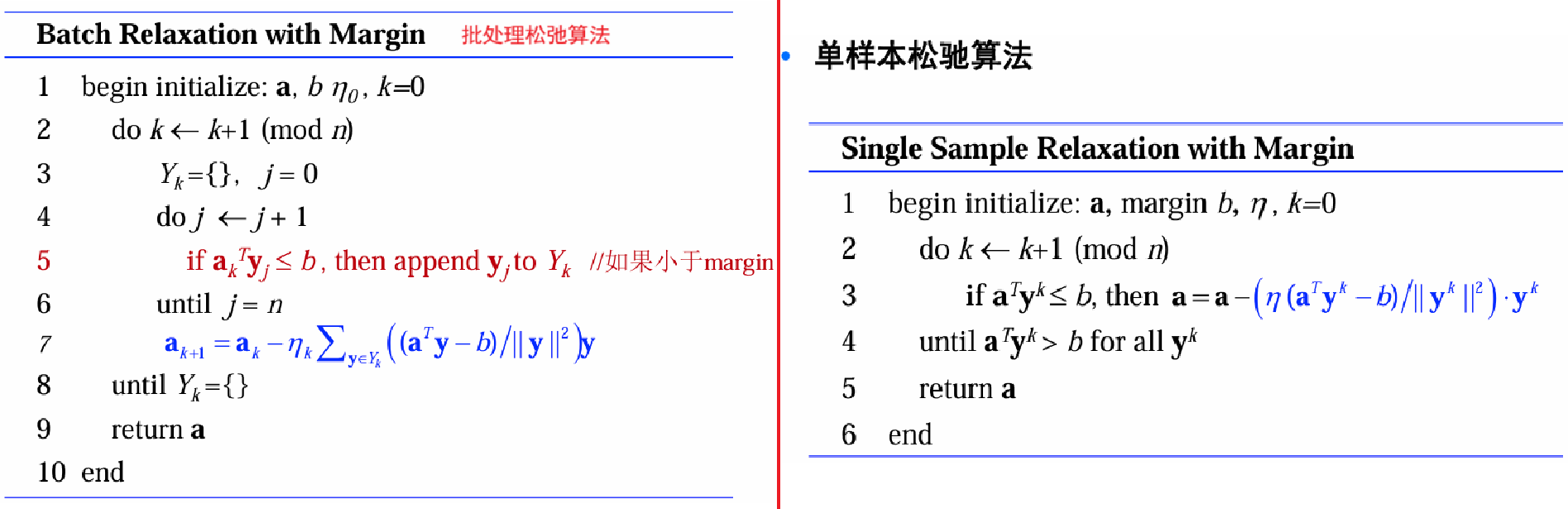
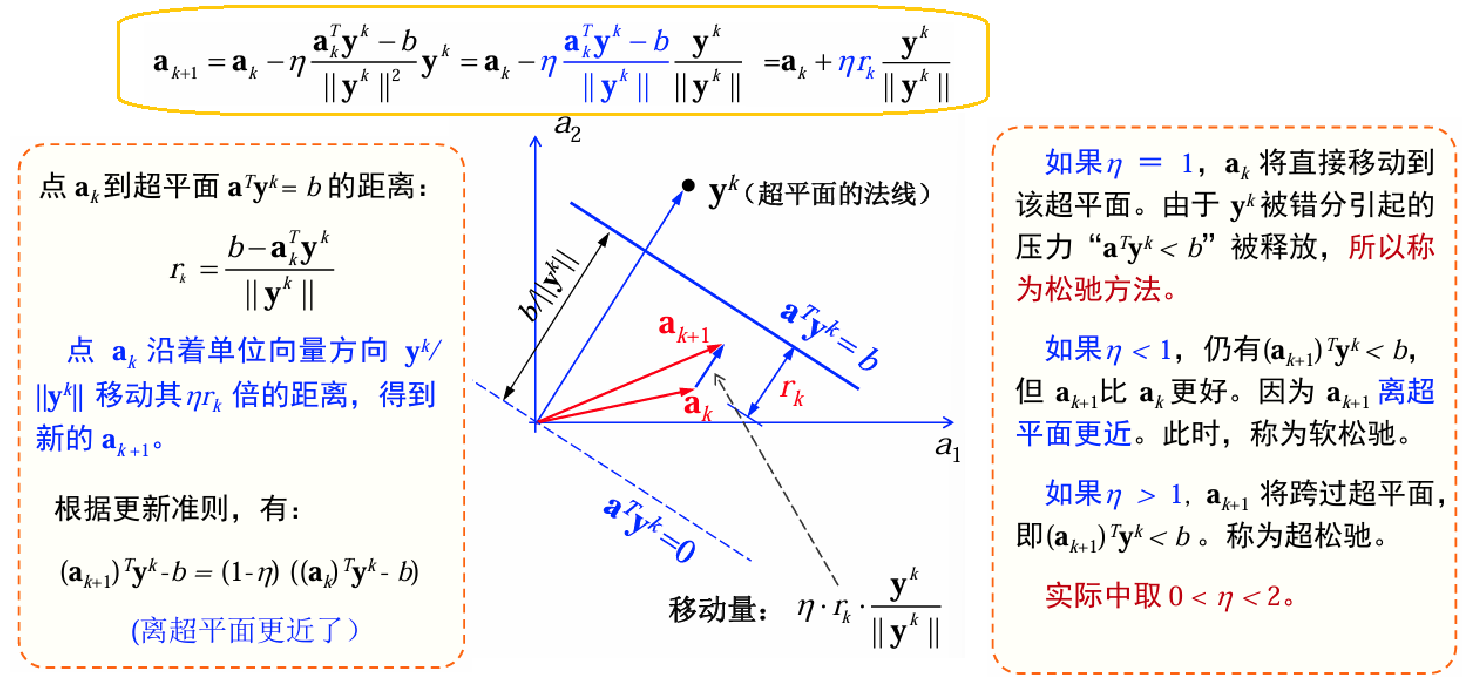
松弛准则的梯度下降:
收敛性证明略。
最小平方误差(MSE)准则函数
前面考虑的准则函数都是只考虑被错分的样本。现在考虑一种包含所有样本的准则函数。
动机:对两类分问题,感知准则函数是寻找一个解向量 a,对所有样本
其中,
线性判别函数的参数估计
可得一个线性方程组:
- 如果
可逆,则 。 - 但通常情形下,
,因此,考虑定义一个误差向量: ,并使误差向量最小。
平方误差准则函数
对其求导:
其中,
实际计算(正则化技术):
梯度下降法
计算伪逆需要矩阵的逆,计算复杂度高。如果原始样本的维数很高,比如
批处理梯度下降:
梯度下降法得到的
将收敛于一个解,该解满足方程: 单样本梯度下降:此方法需要的计算存储量会更小(此时考虑单个样本对误差的贡献)
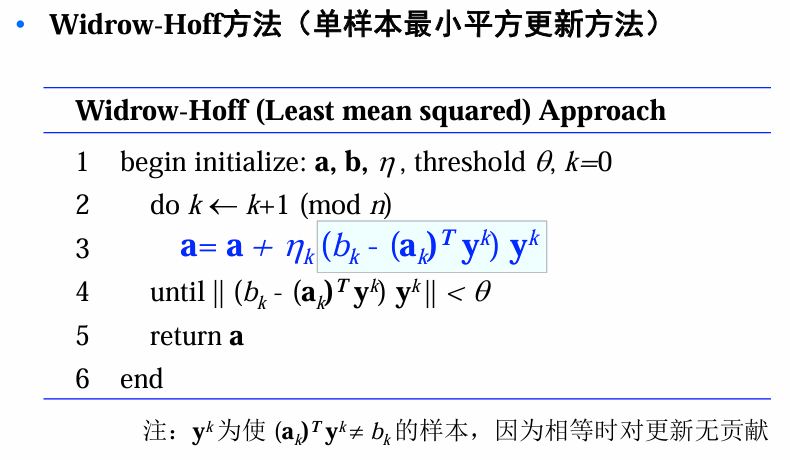
Ho-Kashyap方法
感知器和松弛法对线性可分样本集可找到分离向量,但对于不可分的情况就不收敛了。
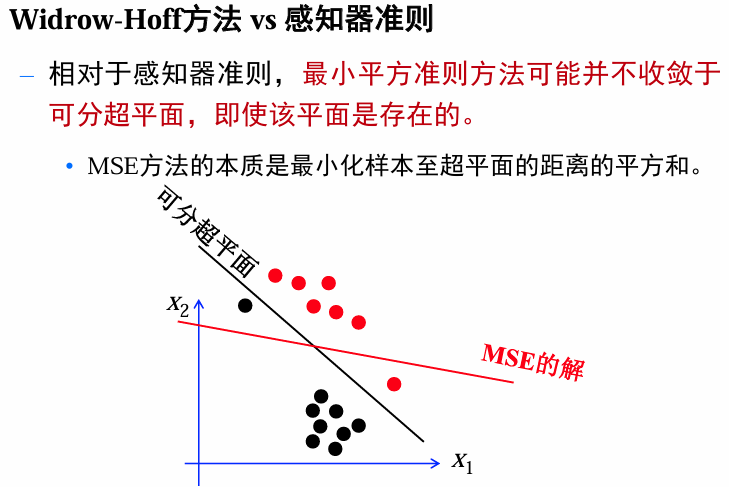
MSE算法不管样本是否可分都能得到一个权向量,但并不能保证在可分的情况下这个向量一定是分类向量。
若margin
是任意选择的,MSE只是 ,所得到的最优解并不需要位于可分超平面上。若训练样本刚好是线性可分的,那么存在 满足: 当我们设置
,利用MSE,就能找到一个分类向量。但是我们没法预知 。
对MSE准则函数更新为:
ps:直接优化
将导致平凡解,所以需要给 添加约束条件: . 此时
可以解释为margin.
梯度下降
约束条件:
因为
更新
- 为了防止
收敛于 ,可以让 从一个非负向量( )开始进行更新。 - 由于要求
等于 ,在开始迭代时可令 的元素为正的分量等于零,从而加快收敛速度。
伪算法
- 由于权向量序列
完全取决于 ,因此本质上讲Ho - Kashyap算法是一个生成margin序列 的方法。 - 由于初始
,且更新因子 ,因此 总是大于 。 - 对于更新因子
,如果问题线性可分,则总能找到元素全为正的 。 - 如果
全为 ,此时, 将不再更新,因此获得一个解。如果 有一部分元素小于 ,则可以证明该问题不是线性可分的。(证明略) 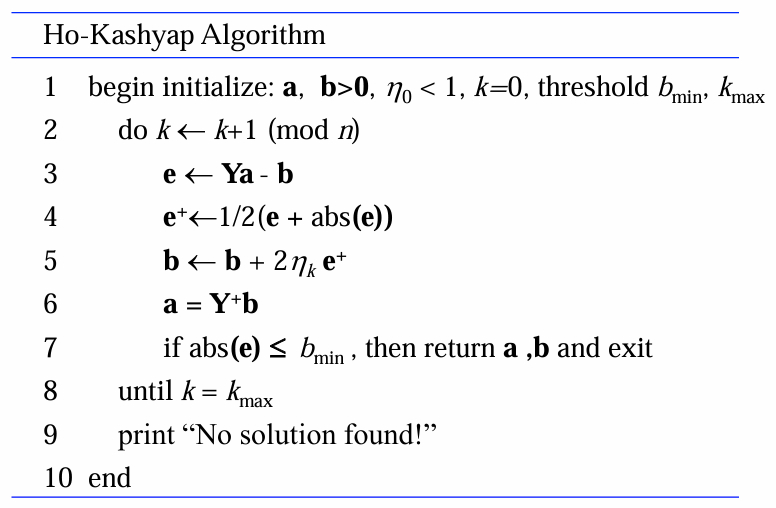
多类线性判别函数
决策规则:
方法一:MSE多类扩展
可以直接采用
线性变换(注,此处不采用规范化增广表示):
决策准则:
回归值的构造:one - hot编码
若
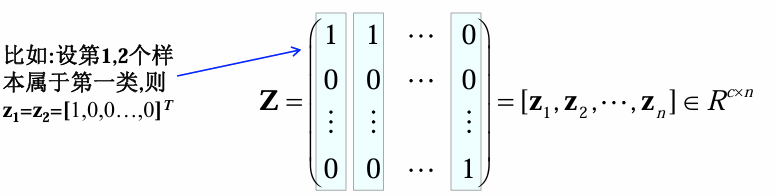
目标函数
令:
则有:
实际中:可能会遇到矩阵奇异或数值不稳定的问题。为此,我们引入正则化项(类似岭回归)