图像处理-Ch4-图像复原
Ch4 图像复原
[TOC]
图像退化与复原(Image Degradation and Restoration)
图像复原目的:以某种预定义的方式改善给定图像。
Q: 图像增强 v.s. 图像复原?
A: 图像增强是一个主观的过程:自行选定不同的工具,比如低通、高通滤波,使得图像主观上看上去比较美观(因个人审美不同而不同)。
而图像复原的大部分过程是客观的。原先是什么样子、恢复原来的样子。
噪声模型(Noise Models)
假设
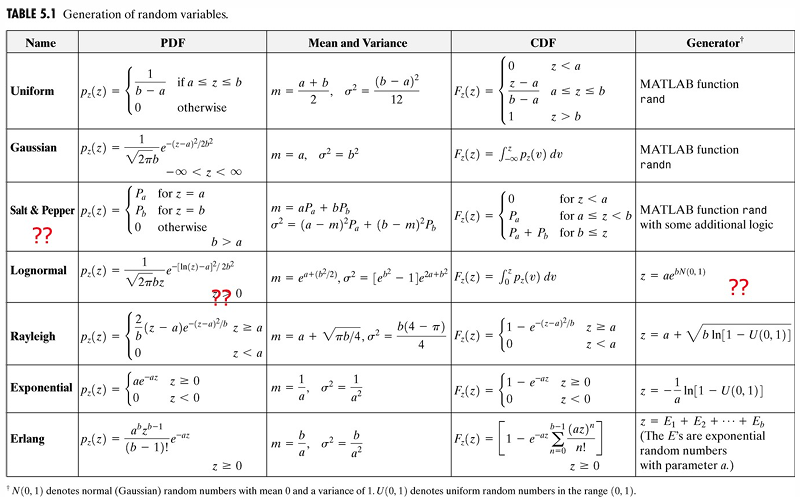
i.i.d.空间随机噪声(Generating Spatial Random Noise with a Specified Distribution)
如果
例:目标是生成具有瑞利(Rayleigh)累积分布函数(CDF)的随机数
。 瑞利分布的累积分布函数(CDF)为:
通过求解方程
,可以得到 的值:
周期噪声(Periodic Noise)
在图像中,周期噪声是在图像获取时从电力或机电干扰中产生的。这是唯一一种空间依赖型噪声。
周期噪声信号(Periodic Noise Signal) :
对于傅里叶变换:(实际上无法推出这个,但是大概是这个形式)
估计噪声参数(Estimating Noise Parameters)
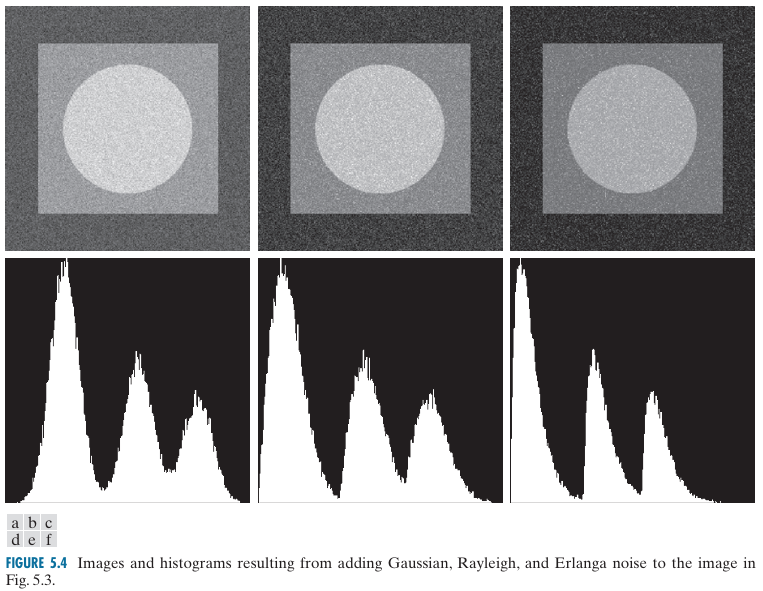
假如没有被噪声污染,那么图中有三个灰度级,直方图中应该有三根线。但是有噪声,现在每根线向两边扩展。
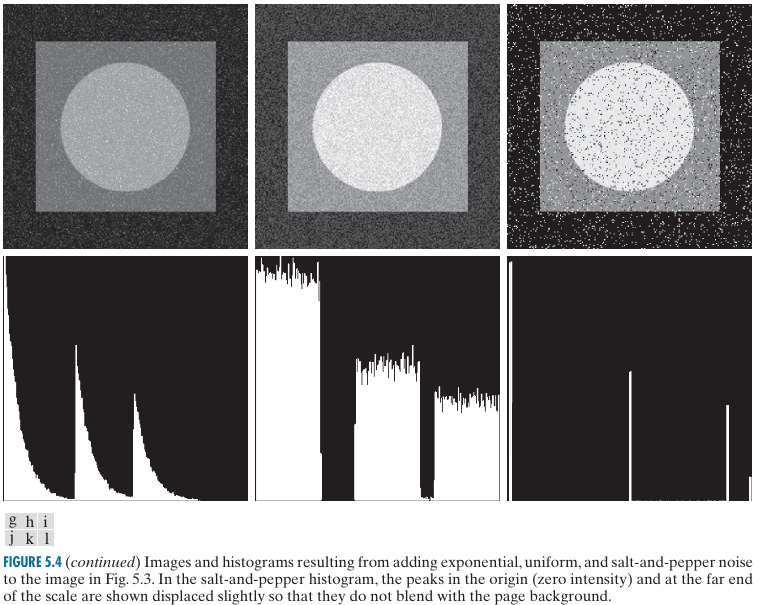
图l对应椒盐噪声的直方图:可以看见一共有4条线(两边分别有两条),椒盐噪声产生黑白、黑色估计和原有的背景色重合,于是直方图中最左的线特别的长(大概的解释)。
估计噪声参数:
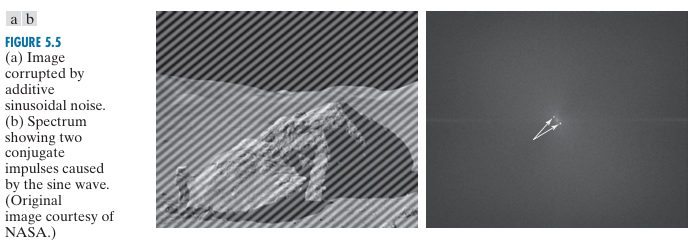
周期噪声:对图像的傅里叶谱审视,可以直接发现:比如在除中心的亮点之外,还有其他的亮点。
具有先验知识:事先知道这种图像中会存在噪声、会出现在哪个频段。
在平坦的图像区域,噪声会暴露出来:比如说一块纯色的地板,应该灰度级是差不多的。
Q: 怎么做?
- 最简单的方法是利用图像中的采样数据来估计噪声的均值和方差。
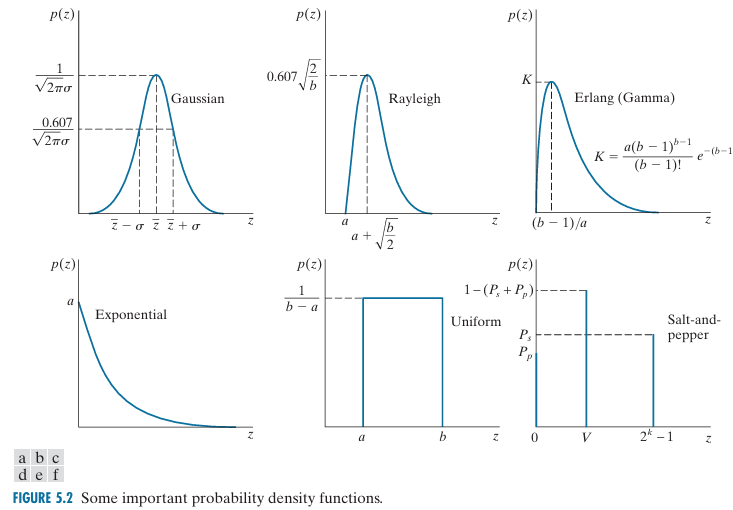
- 通过直方图的形状来辨识最接近的概率密度函数(PDF)的匹配。
- 假如形状类似高斯,那么高斯只需要均值与方差。
统计矩与中心矩:
统计矩:
中心距:
n 对应中心距 0 1 2
在仅有噪声情况下图像复原-空域滤波
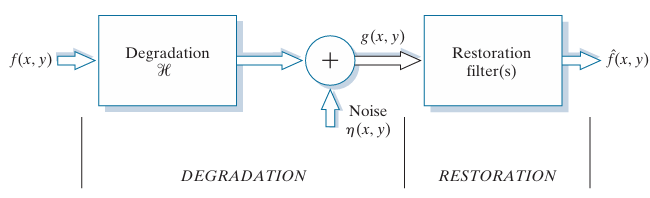
如果只有噪声, 图像退化模型可以表示为:
均值滤波器(Mean Filters)
均值相当于:给出一组数,经过一系列运算,得到一个新的值。这个值,比这组数中最小值大,比最大值小,那么调和均值滤波器、反调和均值滤波器就算均值滤波器。
| 滤波器 | 公式 |
|---|---|
| 算术平均滤波器 | |
| 几何均值滤波器 | |
| 调和均值滤波器 | |
| 反调和均值滤波器 |
调和均值滤波器能够很好地去除盐噪声,但不能去除椒噪声。对于高斯噪声很好。
反调和均值滤波器非常适合消除椒盐噪声。当
为正值时,该滤波器消除胡椒噪声。当 为负值时,它消除盐噪声。它不能同时消除两种噪声。
当Q=0时:算术均值是反调和均值的一个特例。
当Q=-1时:是调和均值滤波器。
统计排序滤波器(Order-statistics Filters)
椒盐噪声反复使用中值滤波器,总能完全去除;同时边缘信息也会丢失。
| 滤波器 | 公式 |
|---|---|
| 中值滤波器 | |
| 中点滤波器 | |
| 最大滤波器 | |
| 最小滤波器 | |
| alpha均值滤波器 |
用频域滤波器消除周期噪声(Periodic Noise Reduction by Frequency Domain Filtering)
关于以下三种滤波器的奇妙比喻:来自王伟强老师。
入冬时存储的土豆,在开春时会发芽。
- 带阻滤波器:连皮肉带芽一起削掉。
- 带通滤波器:与带阻合为1体。
- 陷波滤波器:只把有芽的部分去除。
带阻滤波器(Bandreject Filters)
| ideal | Gaussian | Butterworth |
|---|---|---|
| 这里 |
这里 |
Gaussian高通滤波器也是一种平滑过渡的滤波器,其形状基于高斯函数。 |
| 当频率距离 |
随着 |
它的响应从0逐渐增加到1,过渡更加平滑,没有明显的截断点。 |
带通滤波器(Bandpass Filters)
带通滤波器执行与带阻滤波器相反的操作。得到噪声信号。
带通滤波器与带阻滤波器是一对儿;低通滤波器与高通滤波器是一对儿。
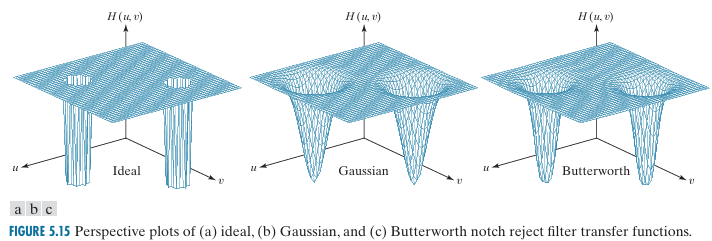
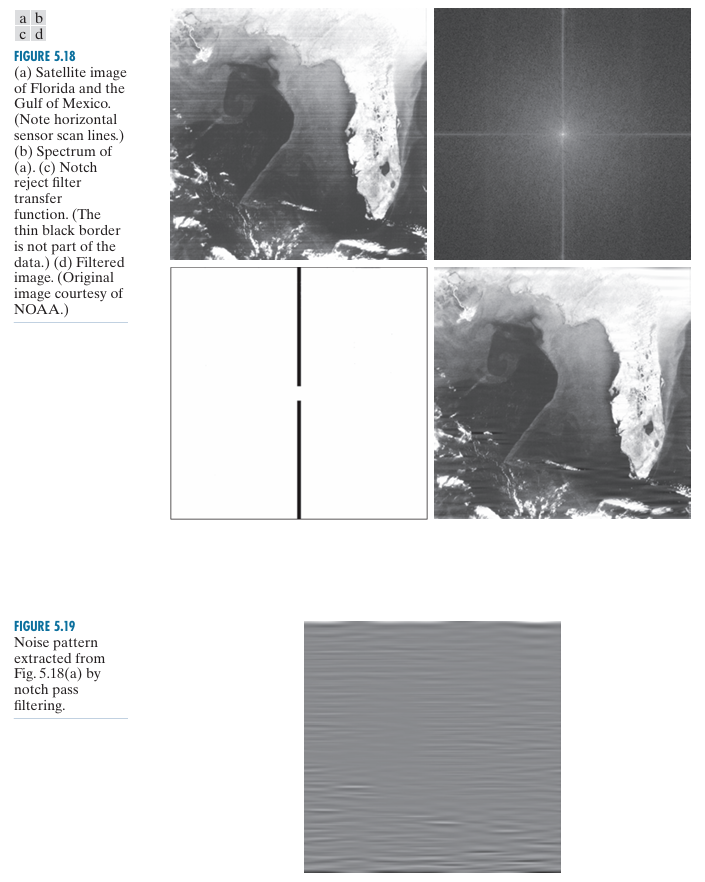
陷波滤波器(Notch filters)
成对出现。(a)是原图像,可以看见存在一些横纹(噪声)。然会得到(b)是(a)的傅里叶谱;通过(c)中的陷波滤波器的传递函数,可以去除掉噪声。(d)是图像复原后的图;(e)是提取出来的噪声。
| Ideal | Gaussian | Butterworth |
|---|---|---|
| 它的过渡比Butterworth滤波器更平滑。 | ||
| 当 |
这种滤波器基于高斯函数,传递函数的值从0逐渐增加到1。 | 随着 |
公式中还定义了
这里
不同的滤波器适用于不同的应用场景,第一种滤波器是理想高通滤波器,具有最尖锐的截止,但会导致振铃效应;Butterworth和Gaussian高通滤波器则提供了更平滑的过渡,减少了振铃效应。
最佳陷波滤波算法(Optimum Notch Filtering)
当存在多个干扰分量时,之前提到的方法并不总是可行的,因为在滤波过程中会去除过多的图像信息。这里讨论的方法是最优的,因为它使恢复估计值
首先,通过以下方式获得噪声的初始估计:
其中
令:
目标:局部很好的平滑性,相邻的像素之间比较相似。
对上式展开:
这个式子中只有
令
为了最小化
这样我们就能求解出每个位置的weight:
估计退化函数(Estimating the Degradation Function)
该节分为以下两个部分进行讨论:
- 假设没有噪声的情况:
- 假设存在噪声的情况,如何处理?
进行图像复原,第一步要做的,就是找到
| 图像观察估计 | 实验估计 | 模型估计 |
|---|---|---|
| 设 |
Hufnagel等人在1964年基于大气湍流的物理特性提出的退化模型. |
|
| 【一叶知秋】完全不知道图像是怎么获得的、只知道这副污染的图像. | 我知道图像是被何设备何场景下拍摄、且我手里有这个设备、我再对特定的对象(平坦)在同样的条件下拍摄。用这个特殊对象来估计污染图像. | 从高空拍摄地面,会受到气流的影响。 |
运动引起的图像模糊(Image Blur due to Motion)
现在,假设一幅图像由于均匀线性运动而变得模糊。
如果
如果
直接逆滤波(Direct Inverse Filtering)
对于被退化函数
可以看到,这个式子中假设
那要是
如果退化函数
一种解决方法是利用原点附近退化函数的值来进行逆滤波的计算。比如设置一个半径:
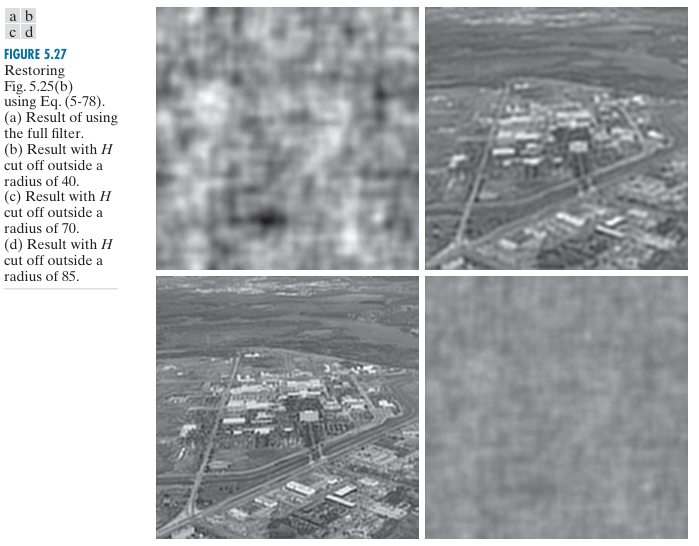
| (a) | (b) | (c) | (d) |
|---|---|---|---|
| 这是使用完整滤波器(full filter)进行恢复的结果。 | 这是将滤波器函数 |
这是将滤波器函数 |
这是将滤波器函数 |
| 图像看起来较为模糊,细节不够清晰。 | good | better | 依托。 |
可以推断出来噪声的频率大于70.(85把噪声包含进去,此时就是
维纳滤波器(Wiener Filtering)
理论上最优的一种图像复原方法。
维纳滤波器寻求使统计误差函数最小化的估计值
此表达式在频域中的解为:
其中 :
| $ | H(u, v) | ^2 = H^*(u, v)H(u, v)$ | $S_n(u, v) = | N(u, v) | ^2$ | $S_f(u, v) = | F(u, v) | ^2$ | ||
|---|---|---|---|---|---|---|---|---|---|---|
| 退化函数 | —- | 是 |
是噪声的功率谱 | 未退化图像的功率谱 |
实际上很难在现实中求解:主要是因为

| (a)(d)(g)原始图像 | (b)(e)(h)逆滤波 | (c)(f)(i)维纳滤波 |
|---|---|---|
| 原始的 8 位图像,受到了运动模糊和加性噪声的影响。 | 图像的模糊有所减少,但噪声被放大了。 | 与逆滤波相比,维纳滤波在减少模糊的同时,较好地抑制了噪声。 |
| 噪声方差降低了一个数量级。 | —- | —- |
| 噪声方差降低了五个数量级。 | —- | 通过降低噪声方差,维纳滤波能够有效地去除噪声并减少模糊。 |
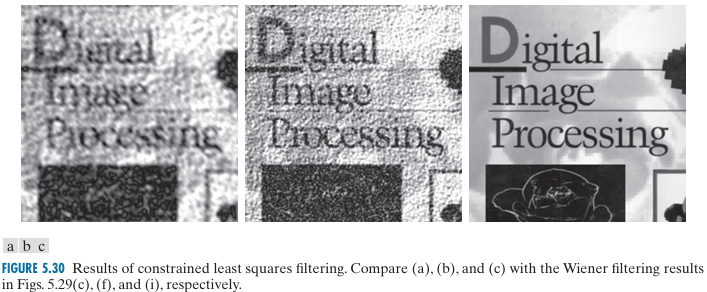
约束最小二乘图像复原算法(Constrained Least Squares Filtering)
了解退化函数
的问题 - 在本章讨论的所有方法中,都存在需要了解退化函数 的问题。 维纳算法不好的是:得事先知道噪声功率谱和未退化图像谱,但这个很难知道。
接下来介绍约束最小二乘滤波方法,这个方法只需要知道噪声的均值和方差。
如果我们用矩阵来模拟退化过程,有:
将其转化成矩阵形式,相当于是做
该方法的核心是
拉普拉斯(图像的二阶导数:
一阶导反映变化快慢、二阶导反映了平滑程度。
需要最小化的代价函数
已知:
其中
令
可以证明
当
足够小,那么 . 回看频域的解: . 已知的条件有:
,那么当 确定时: 然后根据
确定 是否落入区间,不在区间的话,可以不断地调整 ,使 落入邻域。此时,所估计的 是问题的解。
Q: 前面假设噪声已知,那实际中如何计算
下图都展示了经过约束最小二乘滤波处理后的图像。可以看到效果比维纳滤波好一点。